10. Настройка параметров резания
Настройка ФV (П1).
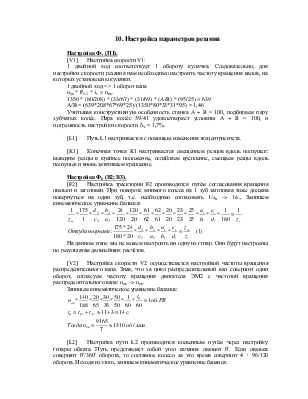
[V1] Настройка скорости V1:
1 двойной ход соответствует 1 обороту кулачка. Следовательно, для настройки скорости резания нам необходимо настроить частоту вращения валов, на которых установлены кулачки.
1 двойной ход => 1 оборот вала
nдв * P1-2 * iv = nкв.
1350 * (80/208) * (33/67) * (31/69) * (A/B) * (95/25) = 639
A/B = (639*208*67*69*25)/(1350*80*33*31*95) ≈ 1,46
Учитывая конструктивную особенность станка A + B = 100, подбираем пару зубчатых колёс. Пара колёс 59/41 удовлетворяет условию A + B = 100, и погрешность настройки скорости δV ≈ 1,7%.
[L1] Путь L1 настраивается с помощью изменения эксцентриситета.
[K1] Конечная точка K1 настраивается смещением резцов вдоль ползушек: выводим резцы в крайнее положение, ослабляем крепление, смещаем резцы вдоль ползушек и вновь затягиваем крепление.
Настройка ФS (В2; В3).
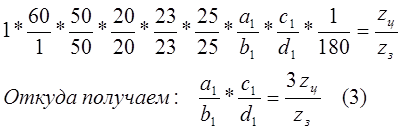
[F2] Настройка траектории F2 производится путём согласования вращения люльки и заготовки. При повороте мнимого колеса на 1 зуб заготовка тоже должна повернуться на один зуб, т.е. необходимо согласовать 1/zм -> 1/zз. Запишем кинематическое уравнение баланса:

На данном этапе мы не можем настроить ни одну из гитар. Они будут настроены по результатам дальнейших расчётов.
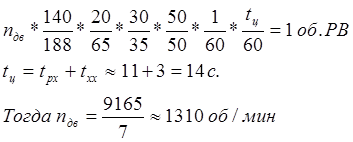
[V2] Настройка скорости V2 осуществляется настройкой частоты вращения распределительного вала. Зная, что за цикл распределительный вал совершит один оборот, согласуем частоту вращения двигателя ЭМ2 с частотой вращения распределительного вала: nдв -> nрв.
Запишем кинематическое уравнение баланса:
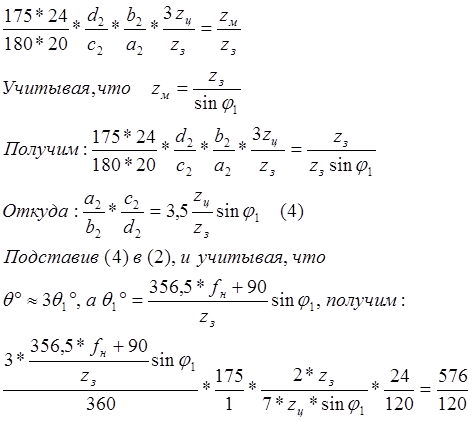
[L2] Настройка пути L2 производится косвенным путём через настройку гитары обката. Путь представляет собой угол качания люльки θ˚. Если люлька совершит θ˚/360˚ оборота, то составное колесо за это время совершит 4 + 96/120 оборота. Исходя из этого, запишем кинематическое уравнение баланса:

На данном этапе мы не можем настроить ни угол качания, ни гитару обката. Они будут настроены по результатам дальнейших расчётов.
[K2] Настройка начальной точки K2 производится поворотом люльки вокруг её оси. Для этого снимается одно из колёс гитары обката, а затем поворачивается люлька на необходимое число делений лимба θ1˚.

Угол θ1˚ отсчитывается против часовой стрелки относительно горизонта.
Настройка Д (В3).
[L3] Настройка пути L3 производится путём согласования вращения распределительного вала (РВ) станка с вращением заготовки. За цикл (1 оборот РВ) заготовка повернётся на zц зубьев, т.е. совершит zц/zз оборота. Тогда кинематическое уравнение баланса запишется следующим образом:
На данном этапе мы не можем настроить гитару деления. Она будет настроена по результатам дальнейших расчётов.
[K3] Начальной точкой K3 для движения деления является положение заготовки в момент завершения рабочего хода. Дополнительной настройки не требуется.
Расчёт передаточных отношений гитар деления и обката.
Подставим уравнение (3) в (1):
Откуда получаем zц = 8,8. Округляем до большего целого значения, не имеющего общих множителей с zз. Тогда zц = 11.
Подставим найденное значение zц = 11 в формулы (3) и (4).
Для гитары деления имеем:
i1 = (a1/b1) * (c1/d1) =3zц/zз = 3*11/42 = (33/63) * (75/50)
Проверка:
a1 + b1 ≥ c1 + 20 96 ≥ 95 Выполнено
c1 + d1 ≥ b1 + 20 125 ≥ 83 Выполнено
Следовательно, зубчатые колёса для гитары деления подобраны правильно.
Для гитары обката имеем:

По специальным таблицам подбираем передаточное отношение, наиболее близкое полученному в ходе расчётов. Тогда для гитары обката имеем:
(a2/b2) * (c2/d2) = 481/915 = (37/61) * (52/60)
Проверка:
a2 + b2 ≥ c2 + 20 98 ≥ 72 Выполнено
c2 + d2 ≥ b2 + 20 112 ≥ 81 Выполнено
Следовательно, зубчатые колёса для гитары обката подобраны правильно.
δF2 ≈ 1,7 * 10-5 = 1,7 * 10-3 %.
Вывод
В процессе выполнения расчётно-графической работы был выполнен структурно-кинематический анализ станка при обработке прямозубого конического колеса. Также были настроены формообразующие движения и движение деления станка с обеспечением требуемой точности.
Список литературы
1. Локтева С.Е. "Станки с программным управлением и промышленные роботы"; Москва: "Машиностроение", 1986 г.
2. Сильвестров Б.Н. "Справочник молодого зуборезчика"; Москва: "Высшая школа", 1986 г.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.