Передаточные функции систем автоматического регулирования [1].
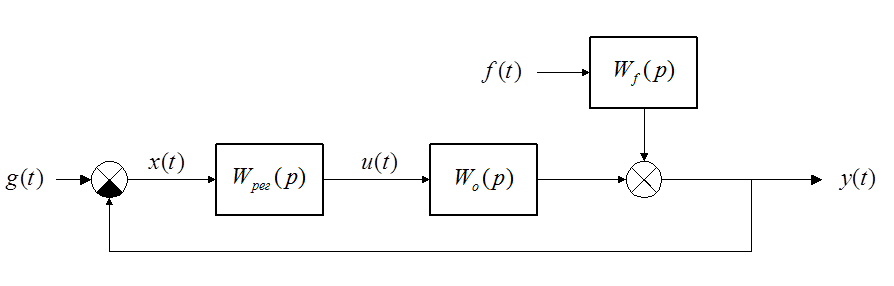
Замкнутая система автоматического регулирования:
Здесь сам
объект регулирования представлен передаточной функцией ![]() ,
определяемой видом дифференциального уравнения, описывающего динамику объекта
регулирования (заданная функция). На его вход поступает управляющее воздействие
,
определяемой видом дифференциального уравнения, описывающего динамику объекта
регулирования (заданная функция). На его вход поступает управляющее воздействие
![]() .
.
Здесь ![]() – сигнал ошибки,
– сигнал ошибки, ![]() –
задающее воздействие,
–
задающее воздействие, ![]() – регулируемая величина,
– регулируемая величина, ![]() – передаточная функция регулятора (предмет
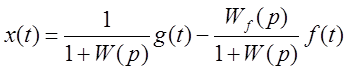
разработки). Регулируемая величина определяется выражением:
– передаточная функция регулятора (предмет
разработки). Регулируемая величина определяется выражением:
![]() .
.
Здесь ![]() –
передаточная функция объекта регулирования по возмущению
–
передаточная функция объекта регулирования по возмущению ![]() .
.
С учётом вида управляющего воздействия:
![]() .
.
Здесь ![]() – передаточная функция по ошибке,
она же – передаточная функция разомкнутой системы.
– передаточная функция по ошибке,
она же – передаточная функция разомкнутой системы.
Уравнение замыкания
![]() .
.
В результате для регулируемой величины:
 .
.
Для ошибки:
 .
.
Передаточная функция замкнутой системы и передаточная функция замкнутой системы по ошибке:
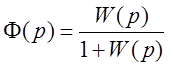 ,
, 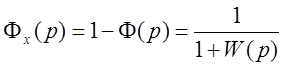 .
.
Ведение
автоматического регулирования уменьшает отклонение регулируемой величины под
влиянием возмущений в ![]() раз.
раз.
Законы регулирования.
Закон
регулирования – зависимость управляющего воздействия от ошибки ![]() , задающего воздействия
, задающего воздействия ![]() и возмущения
и возмущения ![]() :
:
![]() .
.
В общем случае это нелинейная функция x, u, f, а так же их производных и интегралов по времени. Обычно же она имеет вид:
![]() .
.
Первое слагаемое соответствует регулированию по отклонению (принцип Ползунова-Уатта), второе и третье – регулированию по внешнему воздействию (принцип Понселе).
Линейный закон регулирования по отклонению может иметь следующий вид:
 .
.
Пропорциональное регулирование.
Пусть регулируемый
объект – звено статического типа: ![]() , или является таковым
в установившемся состоянии (при
, или является таковым
в установившемся состоянии (при ![]() ).
).
Управляющее воздействие:
![]() .
.
Передаточная функция разомкнутой системы:
![]()
– общий коэффициент усиления разомкнутой системы.
При постоянном задающем
воздействии ![]() установившаяся ошибка, называемая в данном
случае статической ошибкой
установившаяся ошибка, называемая в данном
случае статической ошибкой
 .
.
Установившиеся ошибки по
регулированию и возмущению уменьшились в ![]() раз.
Коль скоро они не равны нулю, регулирование называется статическим.
раз.
Коль скоро они не равны нулю, регулирование называется статическим.
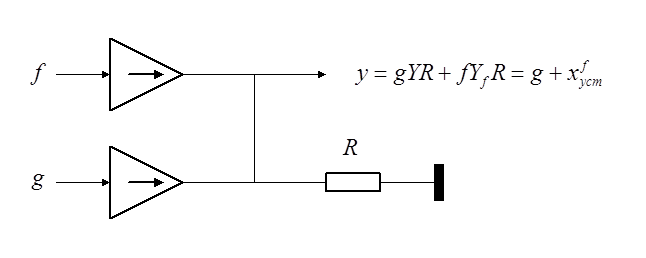
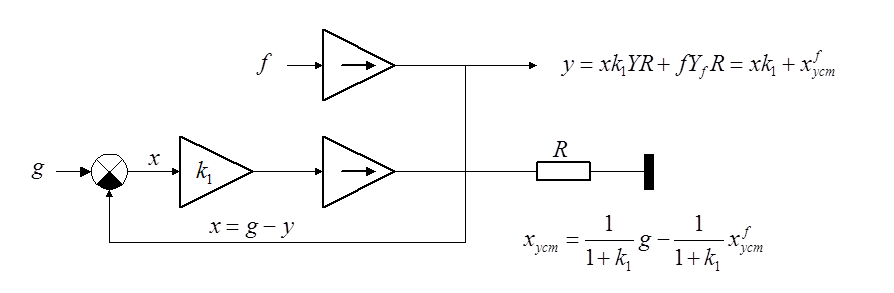
Пример.
Управляемые
напряжением генераторы тока сигнала и помехи работают на общую нагрузку. В
идеале ![]() (при
(при ![]() ).
).
Интегральное регулирование.
Пусть регулируемый
объект – звено статического типа: ![]() , или является таковым
в установившемся состоянии (при
, или является таковым
в установившемся состоянии (при ![]() ).
).
Управляющее воздействие:
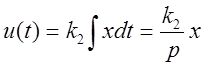 .
.
Передаточная функция разомкнутой системы:

Первая
составляющая ошибки при ![]() обращается в нуль,
т.е. система является астатической по отношению к управляющему
воздействию. Что касается второй составляющей, то следует найти предел
обращается в нуль,
т.е. система является астатической по отношению к управляющему
воздействию. Что касается второй составляющей, то следует найти предел
 ,
,
который может быть как равным нулю, так и отличным от нуля.
Регулирование может осуществляться и по второму интегралу от ошибки по времени:
 .
.
В этом случае имеет место
астатизм второго порядка. Ошибка, определяемая задающим воздействием, будет
равна нулю не только при ![]() , но и при
, но и при ![]() .
.
Повышение порядка астатизма приводит к увеличению установившейся точности системы регулирования, но снижает её быстродействие. Кроме того, усугубляется проблема устойчивости.
Изодромное регулирование.
Управляющее воздействие:
 .
.
Изодромное регулирование сочетает в себе точность интегрального регулирования с быстродействием пропорционального регулирования. В первый момент работает пропорциональное регулирование, с течением времени – интегральное.
Регулирование по производным.
Управляющее воздействие:
 .
.
Самостоятельного значения не имеет, так как в установившемся состоянии производная от ошибки равна нулю. Тем не менее, может играть большую роль в динамике – повышается быстродействие. Так, часто используется изодромное регулирование с добавлением первой производной:
 .
.
Именно такой способ регулирования применён в системе стабилизации радиального положения пучка на протонном синхротроне ТРАПП (ИЯФ).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

