![]()
12. По окончании переходного процесса пусковое сопротивление будет закорочено, после чего к валу двигателя будет приложен момент Мс =Мн. Построим переходной процесс изменения скорости, связанный с приложением нагрузки.
13. Установившееся значение скорости после приложения нагрузки

14. Построим характеристику переходного процесса при приложении нагрузки
![]()
Задача 6. Определить, какой характер будут иметь переходные процессы в электроприводе ТП-Д с разомкнутой и замкнутой по скорости системами регулирования.
Основные данные приводного ДПТ: номинальное напряжение якоря Uян = 220 В; сопротивление якорной цепи Rя =0,6 Ом; индуктивность обмотки якоря Lя = 0,02 Гн; машинная постоянная С= 1,9 Вс; номинальная скорость ωн = 104,5 с-1. Момент инерции привода j∑=1,0 кгм2.
Данные по системе управления Uy=0–10 В; изменению напряжения тиристорного преобразователя от 0 до 300 В линейно соответствует изменение напряжения, подаваемого на систему управления ТП – от 0 до 30 В; коэффициент обратной связи по скорости Кс =0,09 Вс.
Решение
1.Электромагнитная
постоянная времени якорной цепи 
 2. Электромеханическая
постоянная времени
2. Электромеханическая
постоянная времени
3. Коэффициент усиления усилителя в разомкнутой системе
|
4. Напряжение управления ТП,
соответствующее Uтп=220 В ![]()
5. Коэффициент усиления ТП
6. Коэффициент усиления усилителя в замкнутой системе
регулирования ![]() , откуда
, откуда 
7. Коэффициент усиления разомкнутой системы 
8. Эквивалентная электромеханическая постоянная времени в замкнутой по скорости системе
9. Таким образом, для разомкнутой системы следовательно, переходной процесс будет
носить апериодический характер.
следовательно, переходной процесс будет
носить апериодический характер.
10. Для замкнутой системы
 вследствие чего переходной процесс будет представлять
собой затухающие колебания.
вследствие чего переходной процесс будет представлять
собой затухающие колебания.
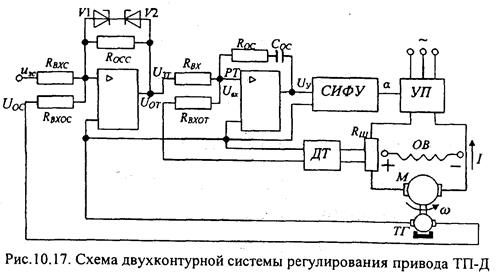
Задача 7. Электропривод по системе ТП-Д с двухконтурной системой подчиненного регулирования выполнен по структурной схеме. Контуры тока и скорости настроены на модульный оптимум. Требуется рассчитать величины настроечных резисторов Rос, Rвх, Rосс, Rвхс и емкость Сос.
Исходные данные: ДПТ НВ с Рн=18 кВт, Uян=440 В, Iян= 41,4 А, ωн= 104,5 с-1, С=4,16 Вс, Rяц=0,45 Ом, Lяц=0,01 Гн, j∑=0.9 кгм2, uж=0–8 В, Тμ=0,0066 с, UTI=48 В.
Решение.
1. Электромагнитная постоянная времени якорной цепи 
2.Электромеханическая постоянная времени 
3.Передаточный коэффициент ТП 
4. Коэффициент обратной связи по
скорости 
5. Коэффициент обратной связи по
току 
6. Принимаем ПИ-регулятор тока 
 ;
; 
7. Величину резисторов и емкости в регуляторе тока находим, полагая
![]() ;
;  ;
; 
8. Принимаем П-регулятор скорости

где ![]()
9. Величина резисторов в регуляторе скорости ![]()
![]()
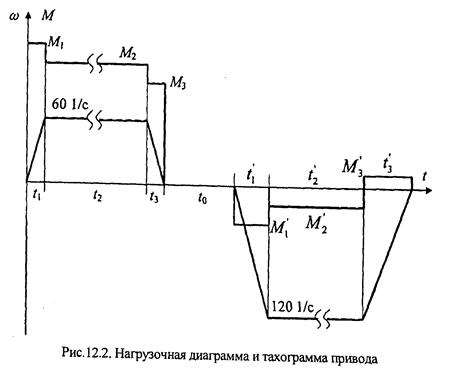
Задача 8. Построить тахограмму движения и нагрузочные диаграммы механизма и привода подъема башенного крана. Цикл работы состоит из подъема груза массой 500 кг и спуска пустого крюка. КПД передачи 0,9, диаметр барабана 0,6м, номинальная скорость двигателя 60 с-1, скорость подъема 1 м/с, скорость спуска крюка 2 м/с (при ослаблении поля двигателя). Момент инерции якоря двигателя и механизма (без груза), приведенный к валу двигателя – 0,2 кгм2, высота подъема 20м.
Решение.
1.Найдем передаточное отношение от вала барабана к валу двигателя
2. Статический момент на валу двигателя при подъеме груза

Момент сопротивления движению при спуске крюка – момент
потерь в передаче (ориентировочно) ![]()
3. Найдем параметры тахограммы движения, полагая ускорение и замедление а1,3=1,0 м/с2

 ;
; ![]()
Тахограмма показана на рис.12.2
4.Приведенная к валу двигателя масса груза

Суммарный момент инерции при подъеме груза ![]()
5. Моменты на валу двигателя
При подъеме груза: 
![]() ;
; 
При спуске груза: 
![]() ;
; 
Нагрузочная диаграмма представлена на рис. 12.2.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.