Время измерения, Тс, как настроечный коэффициент аналого-цифрового преобразователя (АЦП) практически не влияет на качество робастных систем управления, поскольку время срабатывания современных АЦП настолько мало, что приходится вводить ограничения по времени измерения. Оно задаётся конструктивно и может принимать три значения – 0.33 сек, 0,66 сек и 1 секунда. На рисунке 1.7. приведены результаты исследований согласно которым минимальная динамическая погрешность цифровой обработки измерительной информации восьми разрядным АЦП равна 1.24·10-10. Этот минимум приходится на время дискретизации равное 0.001·TC и позволяет рекомендовать в робастных системах применение времени измерения равное одной секунде (TC = 1 сек). Это упрощает как программное обеспечение информационной подсистемы АСУТП, так и эксплуатационные характеристики программного обеспечения управляющей подсистемы.
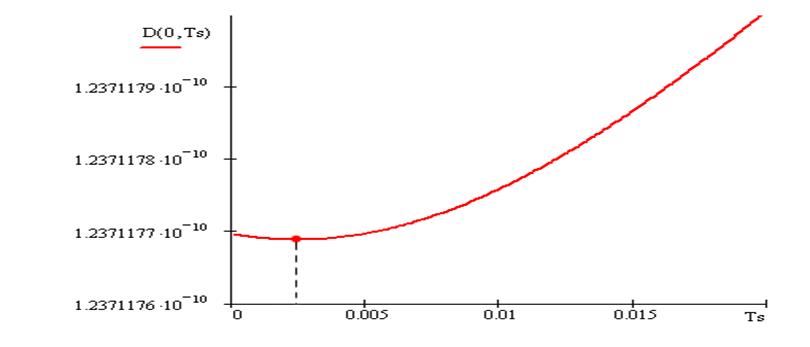
Рис. 1.7 Уровень погрешности измерения 8-разрядным АЦП.
Период опроса датчиков, Тs , как настроечный коэффициент информационно-измерительной системы в целом зависит от случайной функции ошибки цифровой обработки информации в измерительной системе, которая является нестационарной по корреляционной функции. Однако исследование метрологических характеристик некоторых информационно-измерительных систем [9, 60, 62, рис.1.8] показали, что не существует оптимального периода опроса датчиков для измерительной системы. Он существует только для отдельного измерительного канала.
|
|
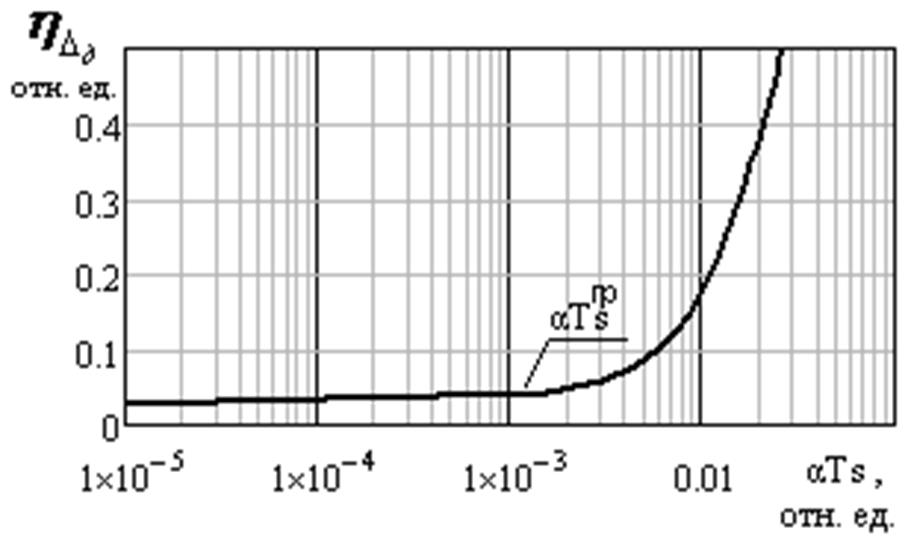
Рисунок 1.8 –Зависимость погрешности обработки информации от TS.
В работе [9], показано ( см. рис. 1.8), что при уменьшении периода опроса датчиков Ts происходит уменьшение динамической погрешности, так как при этом снижается влияние на погрешность потерь информации, связанных с дискретизацией сигналов по времени. Существует верхняя оценка, TSпр, начиная с которой дальнейшее уменьшение периода опроса датчиков практически не приводит к снижению динамической погрешности, так как большее влияние на значение погрешности начинают оказывать динамические свойства компонентов измерительных каналов. Уменьшение периода опроса датчиков меньше верхней оценки с целью снижения динамической погрешности обработки информации в измерительной системе является нерациональным, так как уменьшение погрешности при этом происходит незначительно, но существенно возрастает вычислительная нагрузка на измерительную систему. Поэтому , именно это значение можно принять за оптимальное значение периода опроса датчика, TSпр, в измерительной системе, обеспечивая обработку информации с погрешностью, близкой к минимальной. Проектирование виртуальных приборов по измерению количества произведенного тепла [11], количества потребленного тепла [19] , эффективности работы котлоагрегата [64], качества сварных соединений [25] и др. показало, что критерием качества проектирования виртуального прибора должна быть методическая динамическая составляющая погрешности косвенного измерения (определения) критерия управления. Модель этой погрешности, как правило, является многопараметрической и аналитически не решается из-за большого количества переменных и ограничений. Кроме того, в процессе проектирования очень часто появляются новые требования к конструкции чувствительных элементов [58], что влечет за собой появление новых ограничений и начальных условий работы математических моделей виртуального прибора. Информативность виртуального прибора полностью определяется набором математических моделей и алгоритмов, которые используются при его проектировании. Эти модели и алгоритмы характеризуют все основные этапы создания виртуального прибора от выбора уравнения измерения критериев управления и математических моделей аппаратов и узлов до разработки программного обеспечения и проверки его функционирования и работоспособности на специальной имитационной экспериментальной установке (см. гл. 4.4. и [29]).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.