![]()
Весовая ф-ия это реакция объекта возмущение типа импульс площадь которого =1.
 Импульсом наз. ф-ия Дирака и мат модель идеального
импульса имеет вид.
Импульсом наз. ф-ия Дирака и мат модель идеального
импульса имеет вид.
5. s=
Кривая разгона – реакция объекта на возмущение типа скачек != 1
Частотные динамические хар-ки.
АЧХ- отношение вых сигнала к амплитуде входного от частоты. A(w)=Aвых(w)/Aвх(w) w=1/T
ФЧХ- это разность между фазами вых и вх сигнала как ф-ия от частоты: F(w)=Fвых-Fвх
АФХ- это гадограф вектора длинна которого изменяется в соответствии с АЧХ, а угол поворота в соответствии с ФЧХ.
Если АФХ имеет положительный характер то вектора откладываются против часовой стрелки комплексной плоскости.

6.
7. 5.Типовые элементарные звенья
Все многообразие объектов обладает сложными статистическими и динамическими хар-ми согласно этому их можно разделить на 9 основных типов названых элементарными звеньями. Звенья бывают аналоговые и дискретные. К аналоговым относятся усилительное, аппериадическое, колебательное, интегральное, дифференциальное реальное, дифференциальное идеальное звено и звено чистого запаздывания.
К дискретным относятся ЦАП и АЦП.
Мат. модель- это совокупность мат. ур-ий, которые отображают взаимосвязь вых и вх вел-ин объекта. Мат модель должна отображать особенности объекта существенные с точки зрения управления. Зависимости от физических особенностей процессов протекающих мат модели объекта могут быть детерминированы и столостическими. В детерминированных моделях значения вых вел-ин однозначно зависят от вх параметров для решения таких ур-ий используются методы классического и численного анализа. В стахостических моделях вых вел-ны являются случайными функциями времени и нет четкой зависимости между значениями вх и вых объекта.
Аm(dmy/dtm)+Am-1(dm-1y/dtm-1)+…+A1(dy/dt)+A0=Bn(dnx/dtn) + ….+B1(dx/dt)+dB0 -- Данное ур-ие наз каноническим во временной области и служит для определения условий физической реализации объекта.Объект физически реализован если степень полинома правой части > левой части. Для получения ур-ия с частотной областью выражение преобразуют по Лапласу:
Аm рm у(р)+Аm-1 рm-1 у(Р)+….+А1 ру(Р)+А0 =Вn рn х(Р)+Вn-1 рn-1 х(Р)+…+В1 рх(Р)+В0
Передаточная функция объекта. Передаточная функция объекта называется отношение преобразования по Лагранжу вых сигнала преобразованному вх сигналу.W(P)=y(P)/x(P)
Динамические хар-ки объекта: АЧХ, ФЧХ, АФХ, переходный процесс.
1)Усилительное типовое звено: y(t)=kx(t)
A(w)=k F(w)=0
2)Апериодическое
типовое звено: ![]()
A(w)=![]() F(w)= - arctgTw
F(w)= - arctgTw
3)Колебательное
типовое звено: ![]()
![]()
F(w)=-arctg(T1w/(1-T2^2*w^2))
Колебательное звено обладает 5-ю переходными процессами . Они выводятся на основании решения ДУ 2 порядка.
Решением
уравнения является выражение:![]()
4)Интегральное
типовое звено: ![]()
A(w)=k/w F(w)=-p/2
5) Идеальное дифференциальное типовое звено: y(t)=k*dx/dt
A(w)=kw F(w)= p/2
6)
Реальное дифференциальное звено: ![]()
![]()
7)Звено чистого запаздывания: y(t)=x(t-T)
A(w)=1 F(w)=arctg(-sinwT/coswT)=-wT
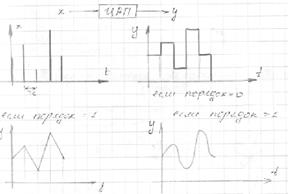
8) Анально-цифровой преобразователь:
 x y
x y
t t
 |
Tc
Тс- время дискретизации y
Тs- ширина импульса (1)
)мат модель:

 Ts t
Ts (2)
Ts t
Ts (2)
Передаточная ф-ия
W1=![]() W2=
W2=![]() Ts
Ts
W=W1+W2==![]()
 =
=
Амплитуда
фаза- частотная хар-ка![]()
![]()
![]()
![]()
9)Цифро-аналог. Преобразователь:
![]()
![]()
8. 6. Типовые соединения элементарных звеньев. Структурные преобразования
В реальных условиях объекты управления редко соответствуют типовым звеньям в чистом виде , чаще всего это более сложные структуры которые путем преобразования приводятся к типовому варианту. Различают три основных типа соединения типовых звеньев: последовательное, параллельное, с обр.связью)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.