Запишем уравнение якорной цепи
|
|
(18) |
и решим его относительно ТЭ:
|
|
(19) |
Выражение (19) позволяет определить ТЭ при произвольном входном сигнале, рассматривая двигатель как нестационарное звено.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Ознакомиться с теоретическим материалом.
2. На основании исходных данных рассчитать передаточную функцию двигателя, которая для виртуального эксперимента будет выражать фактические параметры двигателя.
3. Определить коэффициент усиления двигателя в приращениях.
4. Определить механическую постоянную времени двигателя, используя виртуальные модели с подсистемами, заданными в виде передаточной функции и структурной схемы. Сравнить результаты и сделать выводы.
5. Определить электромагнитную постоянную времени двигателя, используя виртуальные модели для заторможенного и вращающегося двигателя. Сравнить результаты и сделать выводы.
6. Составить отчет по работе.
ПРИМЕР ВЫПОЛНЕНИЯ ЗАДАНИЯ
Исходные данные. Исследуется ДПТ марки МИ-11 со следующими характеристиками: мощность на валу Рном, 0,12кВт; частота вращения nном, 3000 об/мин; напряжение питания Uном, 60В; ток якоря IЯ, 2,86 А; сопротивление обмотки якоря RЯ, 0,46Ом; момент номинальный Мном, 0,39 Н·м; момент инерции Jд·104, 15,3 кг·м2 .
1. Рассчитаем передаточную функцию двигателя постоянного тока, приняв за выходную величину угловую скорость ω
|
|
(20) |
С использование выражений (1) и (2) имеем
|
|
С использование (3) и (4) определим постоянные времени
|
|
Тогда передаточная функция
|
|
Чтобы методика определения коэффициентов двигателя приближалась к эксперименту в производственных условиях, зададим исследуемый объект в виде подсистемы («черного ящика») (рис.1).
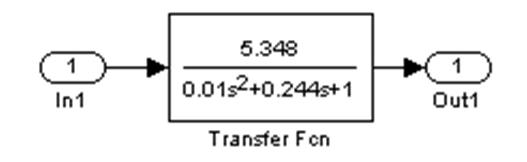
Рис.1. Подсистема двигателя с рассчитанной передаточной функцией
Таким образом, будем считать, что исследуемый объект при виртуальном эксперименте задан рассчитанной передаточной функцией.
2. Определим коэффициент усиления двигателя в приращениях, используя схему, представленную на рис.2.
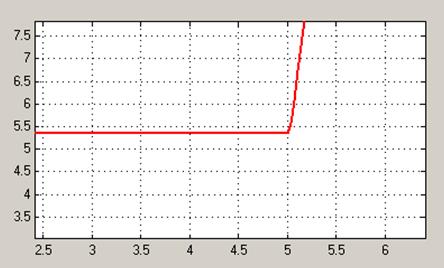
Входным сигналом Step выводим звено на рабочую точку, а затем в установившемся режиме задаем входному сигналу приращение Step1. Согласно осциллограммам рис.3 рассчитаем коэффициент усиления:
 .
.
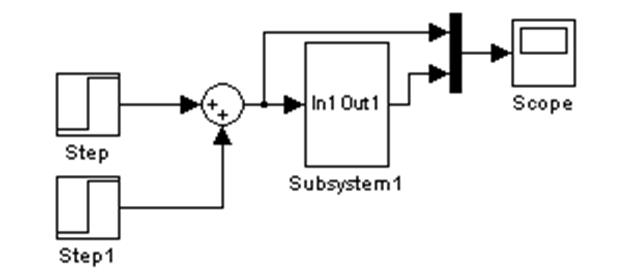
Рис.2. Схема устройства для определения параметров ДПТ
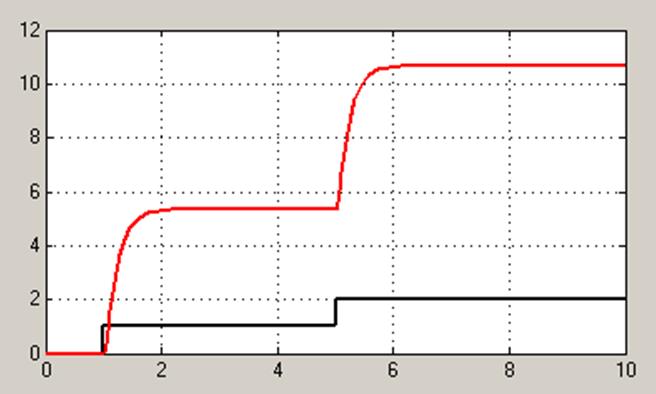
Рис.3. Осциллограммы входного и выходного сигналов
Для более точного определения искомых значений воспользуемся кнопкой Zoom в окне Scope (рис.4).
|
|
|
|
Рис.4. Увеличенная осциллограмма |
|
3. Определим механическую постоянную времени двигателя, используя для этого виртуальную модель (рис.5). То есть эта модель, позволяющая определить коэффициент дифференциального уравнения при первой производной при известном коэффициенте усиления. Для построения модели использована формула (15). С помощью интегратора определяется площадь, а блок Divide осуществляет деление выходного сигнала интегратора на коэффициент усиления. На вход двигателя подается постоянное напряжение 60 В. Коэффициент усиления Gain равен коэффициенту передачи двигателя, а произведение входного напряжения на коэффициент передачи двигателя определяет обороты в установившемся режиме, которое подается на сумматор и в блок Divide.
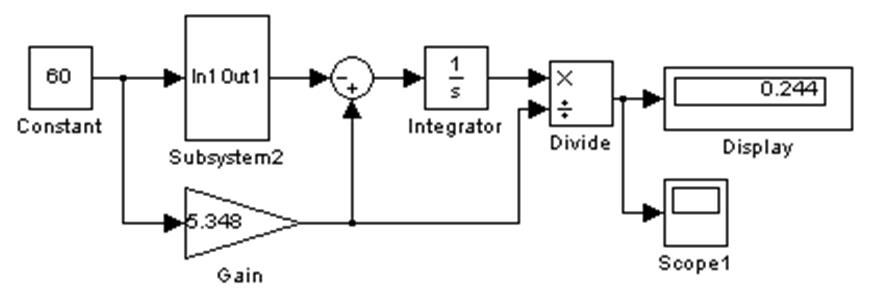
Рис.5. Виртуальная модель для определения механической постоянной времени с подсистемой в виде передаточной функцией
Определим механическую постоянную времени в случае, когда двигатель задан структурной схемой рис.6.
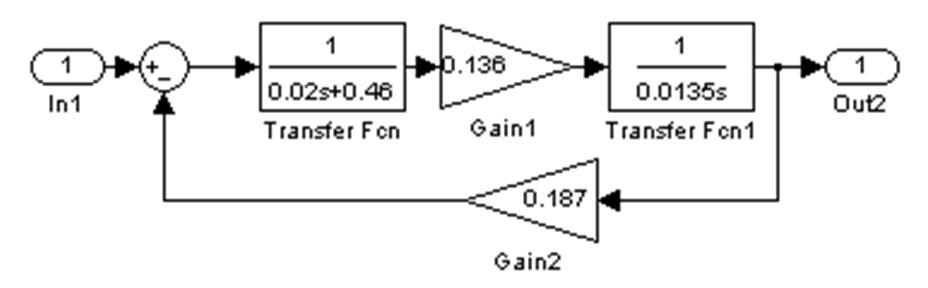
Рис.6. Структурная схема двигателя постоянного тока
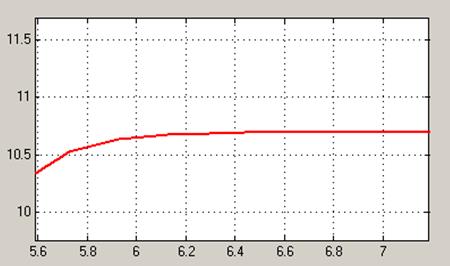
Виртуальное устройство для измерения постоянной времени аналогично рис.5 и задавая Subsystem2 структурной схемой (рис.6) получим результат, представленный на рис.7. Как видно, значения механической постоянной времени практически идентичны.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 ,
, .
. .
. .
.