Министерство образования и науки Российской федерации
Федеральное агентство по образованию
Саратовский государственный технический университет
Балаковский институт, техники, технологии и управления
ИССЛЕДОВАНИЕ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Методические указания к выполнению лабораторной работы по курсу
«Электромеханические системы» для студентов специальности 210100 всех форм обучения
Одобрено
редакционно-издательским советом
Балаковского института техники,
технологии и управления
Балаково 2008
|
Электроприводом называется электромеханическое устройство, предназначенное для преобразования электрической энергии в механическую энергию поступательного либо вращательного движения и включающее электромеханический преобразователь (двигатель) и устройство управления двигателем. По роду тока электропривод разделяется на привод переменного и постоянного тока. В электроприводе постоянного тока в качестве электромеханического преобразователя используется двигатель постоянного тока (ДПТ). ДПТ имеет различные схемы включения: с независимым, параллельным и последовательным возбуждением. В данной работе исследуется двигатель постоянного тока с независимым возбуждением при управлении по цепи якоря.
Цель работы: разработка модели двигателя постоянного тока с независимым возбуждением в Simulink и исследование механических и динамических характеристик.
ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
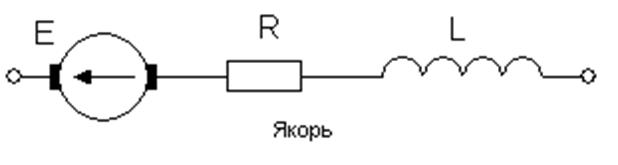
Основные уравнения для двигателя постоянного тока независимого возбуждения (рис.1) при управлении по цепи якоря в динамическом режиме могут быть записаны в виде:
|
|
(1) |
|
|
(2) |
|
|
(3) |
|
|
(4) |
где Uя - напряжение на якорной обмотке двигателя, В;
Е - электродвижущая сила (ЭДС) якоря, В;
Iя- ток якоря, А;
Ф - поток, создаваемый обмоткой возбуждения, Вб;
M - электромагнитный момент двигателя, Н м;
MС - момент сопротивления движению, Н۬ м;
ω - скорость вращения вала двигателя, с-1;
RЯ - активное сопротивление якорной цепи, Ом;
LЯ - индуктивность якорной цепи, Гн;
J - суммарный момент инерции якоря и нагрузки, кг м2;
се - конструктивный коэффициент ЭДС двигателя,
см - конструктивный коэффициент момента двигателя.
|
Обмотка возбуждения |
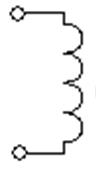 
|
Рис.1. Схема включения ДПТ с независимым возбуждением
При использовании управления по цепи якоря магнитный поток Ф следует считать постоянным. Введем обозначение:
|
|
(5) |
|
|
(6) |
где ke – коэффициент ЭДС, В с;
kм – коэффициент момента, Н м А-1.
Данные коэффициенты ЭДС ke и момента kм являются либо справочными величинами, либо рассчитываются по нижеприведенным формулам, исходя из номинальных параметров двигателя:
|
|
(7) |
|
|
(8) |
Запишем уравнения (1)-(4) с учетом (5), (6) в операторной форме:
|
|
(9) |
|
|
(10) |
|
|
(11) |
|
|
(12) |
С точки зрения будущей модели выделим следующие переменные:
1. Входные воздействия:
- напряжение якоря Uя;
- момент сопротивления движению MС.
2. Выходные переменные:
- электромагнитный момент двигателя M;
- скорость вращения вала двигателя ω.
3. Переменные состояния (переменные, стоящие под знаком производной):
- ток якоря IЯ, который из (9) может быть выражен следующим образом:
|
|
(13) |
- скорость вращения вала двигателя ω, которая может быть выражена из уравнения (10) следующим образом:
|
|
(14) |
Остальные переменные, входящие в состав уравнений (9)-(12), кроме ЭДС Е, являются параметрами, численные значения которых необходимо задавать при проведении расчетов.
В паспортных данных на электродвигатели приводятся основные параметры, такие как: мощность на валу РН (кВт); частота вращения nН (об/мин); напряжение питания UН (В); ток якоря IЯН (А); сопротивление обмотки якоря RЯ (Ом); момент номинальный МН (Н·м); момент инерции J (кг·м2), на основе которых рассчитываются дополнительные.
Номинальная угловая скорость вращения вала ωН,с-1
|
|
(15) |
Индуктивность цепи якоря LЯ, Гн
|
|
(16) |
где р – число пар полюсов двигателя.
Коэффициент ЭДС ke, В с
|
|
(17) |
Коэффициент момента kМ, Н м А-1
|
|
(18) |
СВЕДЕНИЯ О ПРОГРАММНОМ ПРОДУКТЕ
На основании уравнений (9)-(12) с учетом выражений (13), (14) строится Simulink-модель двигателя (рис.2) с использованием стандартной библиотеки пакета.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.


 ;
; ;
; ;
; .
. ;
; .
. .
. ,
, .
. .
.