Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Саратовский государственный технический университет
Балаковский институт, техники, технологии и управления
МОДЕЛИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ПОДЧИНЕННЫМ РЕГУЛИРОВАНИЕМ КООРДИНАТ
Методические указания к выполнению лабораторной работы по курсу
«Электромеханические системы» для студентов специальности 220201 всех форм обучения
Одобрено
редакционно-издательским советом
Балаковского института техники,
технологии и управления
Балаково 2010
|
При проектировании систем управления электроприводом с подчиненным регулированием координат в каждый контур регулирования вводят регуляторы, настраиваемые на технический или симметричный оптимум. При этом увеличивается быстродействие и точность регулирования все системы в целом. Данные методические указания являются продолжением практической работы «Расчет системы управления электроприводом с подчиненным регулированием координат» и позволяют наглядно исследовать влияние регуляторов на переходные процессы системы.
Цель работы - моделирование двухконтурной системы управления электроприводом постоянного тока с подчиненным регулированием координат в Simulink.
ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
На рис.1 изображена структурная схема двухконтурной системы подчиненного регулирования, где Wрт(р) и WРС(р) – передаточные функции регуляторов тока и скорости соответственно, параметры которых рассчитываются исходя из настройки контуров (тока и скорости) на технический и симметричный оптимум.
Рис.1. Структурная схема двухконтурной системы подчиненного регулирования
В этом случае переходный процесс в контурах не зависит от постоянной времени объекта, а определяется величиной малой некомпенсируемой постоянной времени Тμ каждого из контура. На основании изученного раннее материала и проведенных расчетов были выполнены следующие сочетания настроек регуляторов (таблица 1).
Таблица 1 – Виды настроек и их параметры
|
Наименование контура |
Вид настройки |
Вид регулятора |
Перерегулирование |
Время первого согласования |
|
Контур тока Контур скорости |
Технический оптимум Технический оптимум |
ПИ-регулятор П-регулятор |
σ=4,3% σ=4,3% |
tС≈4,7ТμТ tС≈4,7ТμС |
|
Контур тока Контур скорости |
Технический оптимум Симметричный оптимум |
ПИ-регулятор ПИ-регулятор |
σ=4,3% σ=43% |
tС≈4,7ТμТ tС≈3,1ТμС |
Приведенные в таблицы величины перерегулирования и первого согласования являются теоретическими. Для исследования влияния организации подчиненного регулирования на свойства системы управления электроприводом осуществляется моделирование в Simulink.
Структурной схеме системы подчиненного регулирования, представленной на рис. 1 соответствует модель в Simulink, изображенная на рис.2.

Рис.2. Модель системы подчиненного регулирования в Simulink
Цветом выделены звенья, образующие структуру двигателя постоянного тока:
TransferFcn1 – блок, реализующий передаточную функцию:
 ;
;
TransferFcn2 – блок, реализующий передаточную функцию:
 ;
;
Gain2, Gain3 – усилительные звенья с коэффициентами kМ kЕ соответственно.
В блоке TransferFcnзадается передаточная функция тиристорного преобразователя:
 .
.
Усилительные звенья Gain4, Gain5 соответствуют коэффициентам обратных связей по току якоря kОТ и скорости kОС.
Блок Const предназначен для задания угловой скорости в системе управления электроприводом. Его настройка осуществляется из выбора опорного напряжения системы регулирования UСАР=10 В, что будет соответствовать номинальной угловой скорости двигателя ωН на выходе системы.
В качестве меняющегося во времени входного возмущения в системе предполагается использовать момент сопротивления механизма, который приводится в движение данной системой электропривода. Для его задания используется блок Timer, расположенный в библиотеке SimPowerSystems / ExtraLibrary / ControlBlocks. Данный блок предназначен для генерации сигнала, значение которого является функцией времени. На рис.3 представлено окно настройки данного блока. В строке Time задаются значения времени (например, [0 1 3 3,5]), в которые сигнал меняет свою амплитуду, указанную в строке Amplitude (например, [1 -1 2,5 0]).
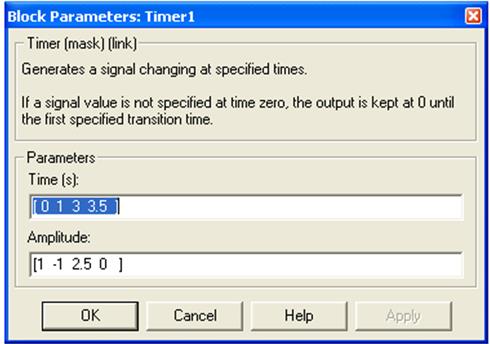
Рис. 3. Окно настройки блокаTimer
Также может быть использован блокSignalBuilder(рис. 4)в библиотеке Simulink / Sources. Данный блок аналогичен блоку Timer, окно его настройки представлено на рис.5. Необходимое изменение во времени значение сигнала задается путем перемещения его мышкой.

Рис. 4. Внешний вид блока SignalBuilder
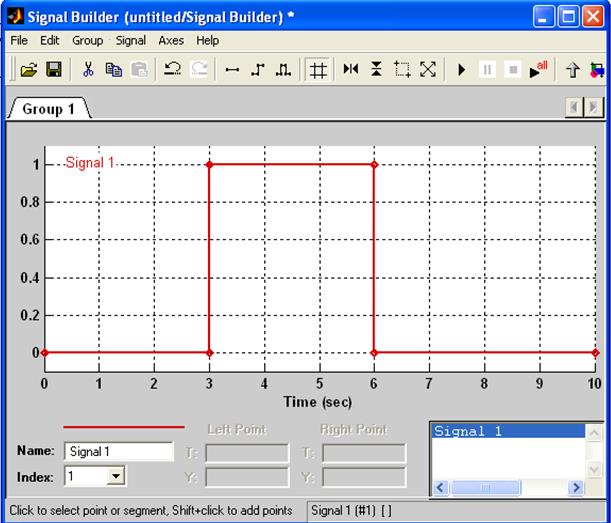
Рис.5. Окно настройки блока SignalBuilder
Регуляторы тока и скорости реализуются с помощью блоков PID Controller1 и PID Controllerсоответственно. Данные блоки расположены в библиотеке SimulinkExtras / AdditionalLinear. Окно настройки данного блока представлен на рис.6.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




