 |
Рис. 5. Запретные области для ЛФХ.
По ![]() -кривым можно определить и запретную область
для ЛАХ по имеющейся ЛФХ и заданному М. Для этого определяются значения модуля
ЛАХ для каждого значения:
-кривым можно определить и запретную область
для ЛАХ по имеющейся ЛФХ и заданному М. Для этого определяются значения модуля
ЛАХ для каждого значения:
![]() .
.
Синтез последовательных корректирующих
устройcтв по JIAX.
Если корректирующее устройство включено в главный контур системы последовательно с остальными звеньями, то корректирующее устройство называют последовательным.
Структурная схема скорректированной системы изображена на рис. 6.
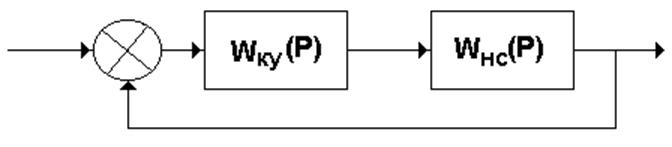
Рис. 6. Структурная схема скорректированной системы:
Wнс (Р) - передаточная функция нескорректированной системы;
Wку (Р) - передаточная функция корректирующего устройства.
Поскольку для последовательного соединения
Wск(P)=Wку(P) .Wнс(P) (5)
или
Lск=Lку -Lнс , (6)
то
Lку= Lск -Lнс . (7)
Таким образом, для определения ЛАХ последовательного корректирующего устройства необходимо:
- построить ЛАХ Lнснескорректированной (исходной) системы;
- построить желаемую ЛАХ Lж;
- найти ЛАХ Lкукорректирующего устройства, для чего из ЛАХ вычесть ЛАХ Lнс;
- по найденной ЛАХ Lкуи таблицам характеристик типовых корректирующих устройств (табл. I, 2) определить схему и параметры коррекции.
Пример I. Передаточная функция системы имеет вид:
Определить схему и параметры последовательного электрического корректирующего устройства, если
K=80 c; Т1=0,2
с; Т2=0,02 с; Тпл=2 с; ![]()
![]()
Структурная схема скорректированной системы изображена на рис. 7.
Рис. 7. Структурная схема скорректированной системы
Решение.
1. Строим ЛАХ нескорректированной системы. Частоты сопряжения равны:
При ![]() =1 откладывается
значение 20lgK=20lg80=38 дб.
=1 откладывается
значение 20lgK=20lg80=38 дб.
Через
точку А (рис. 8) проводим асимптоту с наклоном - 20 поскольку исходная система астатическая
поскольку исходная система астатическая ![]() . При
частотах сопряжения
. При
частотах сопряжения ![]() и
и ![]()
![]() происходит излом Lнс на 20
происходит излом Lнс на 20 .
.
2. Определяем частоту среза желаемой ЛАХ Lж.
Нижняя граница
 ,
,
где ![]() =4,3 (см. рис 1).
=4,3 (см. рис 1).
Следовательно ,

3. Определяем запасы устойчивости по модулю h и
по фазе ![]() , исходя из перерегулирования
, исходя из перерегулирования ![]() (рис. 3):
(рис. 3):
h=13
дб; ![]() =420 .
=420 .
4. Строим желаемую ЛАХ.
При ωср.ж проводим асимптоту с наклоном – 20 дБ/дек. Отложим по оси ординат запас устойчивости по модулю ±h и проведем линии, параллельные оси частот ω. Точки пересечения прямых +h и –h с асимптотой – 20 дБ/дек определяют среднечастотную зону.
Для упрощения корректирующего устройства произведем излом высокочастотного участка Lж в точке ω5 , уменьшив при этом запас по модулю до 9 дБ. Однако в области высоких частот некоторое уменьшение запаса устойчивости обычно несущественно ухудшает переходный процесс, поскольку при этом увеличение абсолютного значения | Pmin | по сравнению с принятым | Pmin |=Pmax – 1 незначительно. По виду Lку определяем электрическую схему корректирующего устройства (рис. 9).
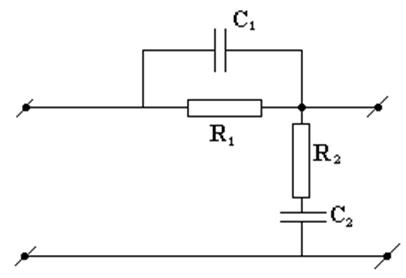
Рис. 9. Схема коррекции
Передаточная функция коррекции равна:
 ,
,
где T1=R1C1; T2=R2C2 ;
T3 и Т4 определяются из системы уравнений
Для рассмотренного примера:

Определение параметров элементов корректирующего устройства является неоднозначной задачей, поскольку алгебраическая система, связывающая неизвестные параметры корректирующего устройства с коэффициентами его передаточной функции является избыточной, т.е. число неизвестных превышает число уравнений. Поэтому при расчете элементов схемы корректирующего устройства одним из её параметров задаются ( обычно задаются величиной емкости С2 из условия согласования входного и выходного сопротивлений ).
Определим запас по фазе при частоте среза ![]()


Синтез параллельных корректирующих
устройств пот ЛАХ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.