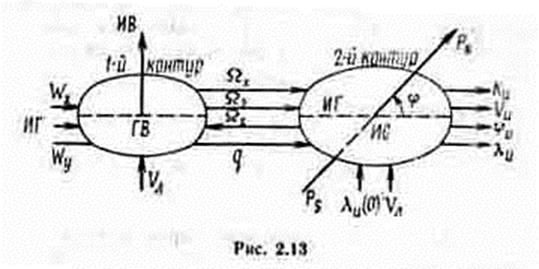
В первом контуре ИНС по ускорениям WX, WY, измеренным акселерометрами, и скорости от лага Vл вырабатываются абсолютные угловые скорости вращения истинной вертикали ( плоскости истинного горизонта) в инерциальном пространстве WXWY и курсовой угол q платформы. Таким образом, на корабле физически моделируется направление истинной вертикали. Это позволяет определить углы бортовой q и килевой y качки корабля.
Полученные значения WXWY, q используются во втором контуре ИНС для аналитического моделирования оси мира РNРS по специальным алгоритмам. Зная ИВ и направление оси мира (осивращения Земли), можно определить плоскость меридиана места. Угол между осью мира и плоскостью ИГ будет равен шпроте места. По такому принципу во втором контуре ИНС с использованием Vл аналитически вычисляются широта jи, курс Ки скорость движения Vи и скорость изменения долготы lи. Вычисление текущего значения долготы lи осуществляется с использованием начальной величины lи(0) по формуле
Во втором контуре ИНС производится также определение скорости вращения плоскости меридиана в инерциальном пространстве WZ. Величина WZ используется в первом контуре ИНС для стабилизации платформы в плоскости меридиана.
При плавании в пределах визуальной видимости береговых ориентиров для периодической корректуры координат места корабля и поправки курса используются пеленгаторные репитеры, дальномеры и секстаны.
Пеленгаторные репитеры устанавливаются на мостике корабля. С их помощью осуществляется измерение направлений на береговые ориентиры.
Оптические дальномеры устанавливаются на надстройке корабля. Ими измеряют дистанции до береговых ориентиров.
Ручной секстан - навигационное устройство, предназначенное для выполнения измерений высот небесных светил над видимым горизонтом, а также горизонтальных углов между ориентирами вручную.
Эхолот - навигационное устройство, предназначенное для измерения глубины с помощью акустических эхо-сигналов.
Сущность акустического способа измерения глубины заключается в фиксировании промежутков времени между моментами посылки импульса и приема отраженного от грунта эхо-сигнала (рис. 2.14).
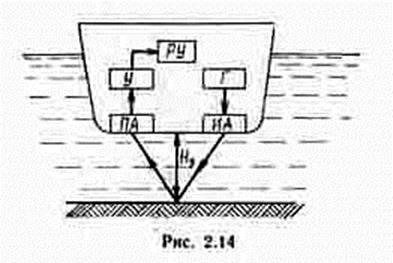
Генератор (Г), создающий электрические колебания ультразвуковой частоты, возбуждает в излучающей антенне (ИА) механические колебания той же частоты. Импульсы этих колебаний, отражаясь от грунта, приходят на принимающую антенну (ПА), где преобразуются в электрические сигналы. На усилителе (У) принятый сигнал усиливается до величины, достаточной для срабатывания регистрирующего устройства (РУ). С использованием промежутка времени между посылкой и приемом сигналов t и скорости распространения звука в воде с в регистрирующем устройстве производится расчет глубины Нэ по формуле
Нэ = (с / 2) t.
Отображение глубины осуществляется с помощью проблесковых и цифровых индикаторов и самописцев.
Радиопеленгатор - радиотехническое устройство, предназначенное для пеленгования объектов, излучающих радиосигналы.
Для радиопеленгования используется замкнутая рамочная антенна (РА) и ненаправленная антенна (НА) (рис. 2.15). Рамочная антенна состоит из двух взаимно перпендикулярных рамок, плоскость одной из которых совпадает с диаметральной плоскостью корабля.
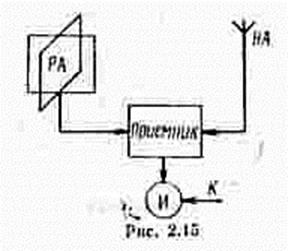
Принцип работы радиопеленгатора основан на свойстве рамки выделять радиосигналы в зависимости от направления их распространения относительно плоскости рамки. Приемное и индикаторное устройства обеспечивают прием радиосигналов от береговых радиомаяков, их усиление, обработку и измерение радиокурсового угла. Для измерения радиопеленга в индикаторное устройство автоматически вводится курс от компаса.
Рост требований к точности и надежности выработки навигационных параметров обусловил необходимость создания навигационных комплексов (НК). В НК реализованы следующие основные принципы комплексирования:
- автоматизация обмена информацией между приборами и системами;
- информационная избыточность, предполагающая использование информации, вырабатываемой несколькими однотипными и разнотипными приборами и системами;
- структурная избыточность, предполагающая использование резервных и дублируемых приборов и систем;
- автоматизация обработки навигационной информации для получения наилучшей оценки вырабатываемых параметров;
- иерархическое построение систем.
Ядром типового НК является ИНС, состоящая из двух или трех автономных каналов выработки информации (рис. 2.16).
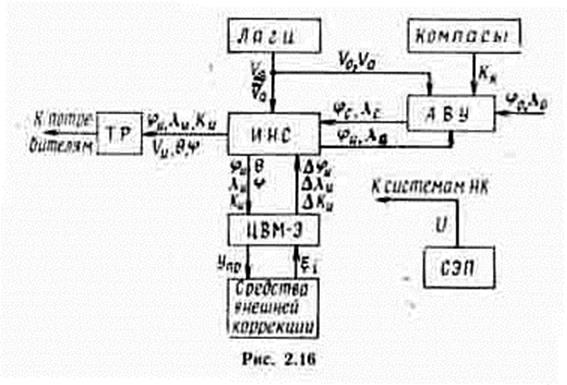
В качестве резервного средства счисления координат места jс, lс используется аналоговое вычислительное устройство (АВУ). Резервным средством курсоуказания являются компасы. Определение относительной V0 и абсолютной скорости Va осуществляется лагами. Для эпизодической коррекции вырабатываемых параметров в НК предусмотрены средства коррекции, включающие в себя астро- и радио-оптические системы, а также приемоиндикаторы спутниковых и радионавигационных систем. Измеренные средствами коррекции параметры xi поступают в ЦВМ эпизодического действия (ЦВМ-Э). Назначением ЦВМ-Э является управление средствами коррекции, обработка измеренных параметров, а также вычисление поправок координат Djи, Dlи и курса DКи, выработанных ИНС. Для обеспечения правильной работы в ЦВМ-Э и средства коррекции транслируются углы бортовой q и килевой y качки корабля. Система электропитания СЭП обеспечивает НК всеми видами электрического питания U. Выработанная в НК навигационная информация передается через систему трансляции (ТР) потребителям.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.