В соответствии с законом электромагнитной индукции при движении проводника длиной L со скоростью V в постоянном магнитном поле перпендикулярно вектору магнитной индукции В в проводнике наводится ЭДС, равная
Е = ВVL.
Для реализации индукционного метода измерения скорости в днище корабля устанавливается приемное устройство 1-индукционный первичный преобразователь скорости (ИППС), содержащий электромагнит 2 и измерительные электроды 3 (рис. 2.10). ИППС жестко связан с корпусом корабля. В объеме воды, окружающей ИППС, можно условно выделить некоторый токопроводящий контур l, замыкающийся через измерительные электроды 3 и соединительные проводники 4 на измерительную схему 5.
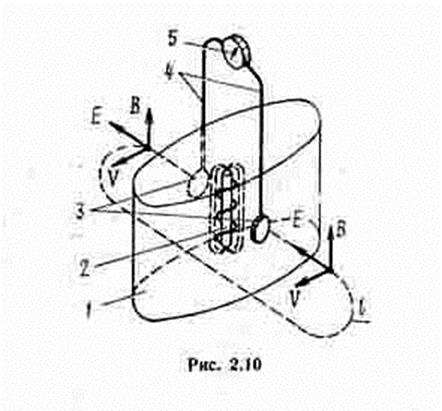
Следовательно, измерив напряжение, возникающее на измерительных электродах за счет наводимой в воде ЭДС, можно определить скорость перемещения магнитного поля относительно воды, то есть определить относительную скорость корабля.
Полученное значение скорости подается на индикаторы и на интегрирующий привод выработки пройденного расстояния.
2.3.3 Абсолютные лаги
В настоящее время из этой группы лагов получили широкое распространение абсолютные гидроакустические доплеровские лаги (АГДЛ), которые измеряют скорость корабля относительно дна. Принцип действия АГДЛ основан на использовании эффекта Доплера и законов распространения акустических волн в воде. Реализация указанных принципов работы АГДЛ производится следующим образом (рис. 2.11).
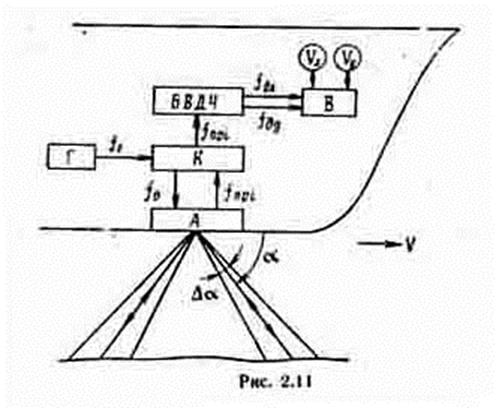
В днище корабля, движущегося со скоростью V, установлена приемно-излучающая антенна А. В режиме излучения коммутатор К подключает антенну к генератору Г, и в водную среду излучается узкий пучок звуковых лучей частотой f0. Луч направлен в сторону морского дна под углом a = 45 - 60°, раствор диаграммы направленности Da= 2 - 3°. Для обеспечения чувствительности и точности измерений применяется четырехлучевая антенна с диаметрально-траверзной ориентацией осей. Таким образом, происходит излучение звуковых сигналов в сторону носа, кормы, левого и правого бортов корабля. Это позволяет измерить продольную VX и поперечную VY составляющие скорости движения корабля.
Морское дно отражает звуковые сигналы, которые воспринимаются антенной А и в режиме приема через коммутатор К поступают в блок выделения доплеровских частот (БВДЧ). Вследствие эффекта Доплера частота принятых i-й антенной лага отраженных сигналов fпрi, будет отлична от частоты излучения f0 и равна
fпрi = f0 (с + V соs a) / (с - V соs a), (2.15)
где с - скорость звука в воде.
В БВДЧ с использованием (2.15) производится выделение доплеровского сдвига частоты по осям ориентации лучей:
 (2.16)
(2.16)
где fдx, fду - доплеровский сдвиг частот по осям Х и У соответственно; fпр н, fпр к, fпр п, fпр л - частоты сигналов, принимаемых антеннами, ориентированными соответственно в сторону носа, кормы, правого и левого бортов корабля.
Из (2.16) видно, что составляющие скорости движения корабля будут равны
 (2.17)
(2.17)
Полученные по (2.16) значения fдx, fду из БВДЧ транслируются в вычислитель В, где по (2.17) рассчитываются значения VX и VY.
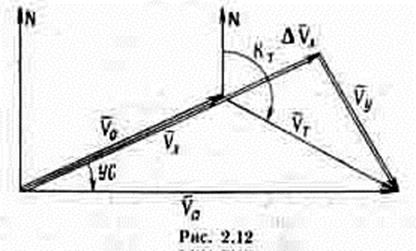
С использованием VX и VY можно определить вектор скорости течения VТ, угол сноса корабля (УС) и вектор абсолютной скорости движения корабля относительно дна Va (рис. 2.12). Для этого из вектора VX необходимо вычесть вектор относительной скорости V0, измеренный с помощью компаса и относительного лага. Полученная разность DVX векторно складывается с составляющей VY . Эта векторная сумма будет равна вектору скорости течения:
VТ = DVX + VY.
Вектор Va равен
Va = V0 + VТ.
Угол между вектором V0 и вектором Va называется углом сноса.
Автосчислителем называется навигационный прибор, предназначенный для вычисления текущих (счислимых) координат корабля. Автосчислитель осуществляет аналитическое счисление координат места корабля.
Автопрокладчик предназначен для ведения прокладки на навигационной морской карте или навигационном морском плане. Автопрокладчики используются совместно с автосчислителями.
Инерциальная навигационная система (ИНС) предназначена для определения координат и параметров движения корабля. Она основана на использовании инерционных свойств движущихся материальных тел. Чувствительными элементами ИНС являются акселерометры и гироскопы. Акселерометры измеряют кажущиеся ускорения относительно инерциальной системы координат ОзХиYиZи (см. рис. 2.3). Гироскопы необходимы для выработки базовых (отсчетных) плоскостей и направлений. Нормальная работа ИНС достигается дополнительным использованием внешней информации (как правило, скорости движения корабля). ИНС позволяет автономно определить широту jи, скорость Vи, курс Ки, углы крена q и дифферента y. Для получения долготы lи в ИНС необходимо вводить начальное значение долготы lи(0).
В зависимости от способов построения истинной вертикали (ИВ) места, оси мира РNРS и выработки основных навигационных параметров различают три типа ИНС: геометрические, полуаналитические и аналитические. В качестве примера рассмотрим полуаналитическую ИНС.
В ИНС полуаналитического типа горизонтная система координат ОNЕn моделируется с помощью платформы, на которой установлены акселерометры и гироскопы. Каждый гироскоп по сигналам акселерометра стабилизирует платформу относительно одной горизонтальной оси: ОХ или ОУ. Один или оба гироскопа стабилизируют ее относительно вертикальной оси OZ. Построение оси мира и вычисление основных навигационных параметров производится аналитически в ЦВМ. Принцип действия полуаналитической ИНС поясним с помощью рис. 2.13.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.