Все эти приборы могут быть построены по одному из известных методов измерения:
· потенциометрический,
· ёмкостный,
· индуктивный,
· на основе эффекта Холла,
· на основе магниторезистивного эффекта и явления магнитострикции,
· оптический.
И только устройства второй группы способны и специально ориентированы на измерение значительных (более 1 метра) перемещений. Необходимость в них чрезвычайно велика в различных задачах приводной техники. Достаточно сказать, что точность позиционирования подвижных органов станка, достигаемая чисто механическими средствами, находится на уровне 0,01мм, тогда как использование в управляемых приводах шифраторов приращений и абсолютных шифраторов оптического типа позволяет довести точность до уровня 0,001 мм, т.е. снизить погрешность почти в 10 раз.
Оптический тип датчика упоминается здесь потому, что он основан на применении оптоэлектронного метода считывания (рис. 22). По сравнению с магнитным методом считывания (рис. 23), который обеспечивает разрешающую способность около 0,1 мм, т.е. примерно 10 периодов выходного сигнала на 1 мм перемещения носителя, оптический метод устойчиво работает при размерах кодирующих сегментов и расстояний между ними порядка единиц микрон. Дальнейшее уменьшение размеров кодирующих площадок нарушает традиционные представления о прямолинейности прохождения светового луча и начинает создавать дополнительные трудности детектирования сигнала.
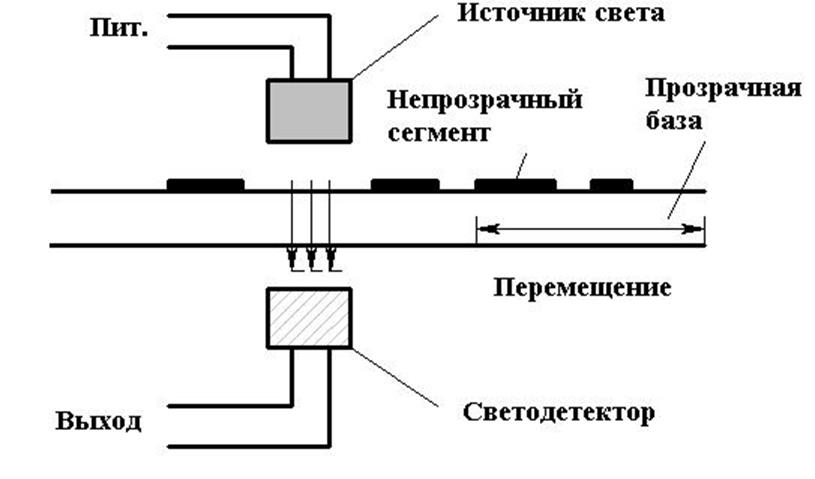
Рис. 22
Таким образом, разрешающая способность кодирующего устройства напрямую связана с минимальным размером кодирующих сегментов.
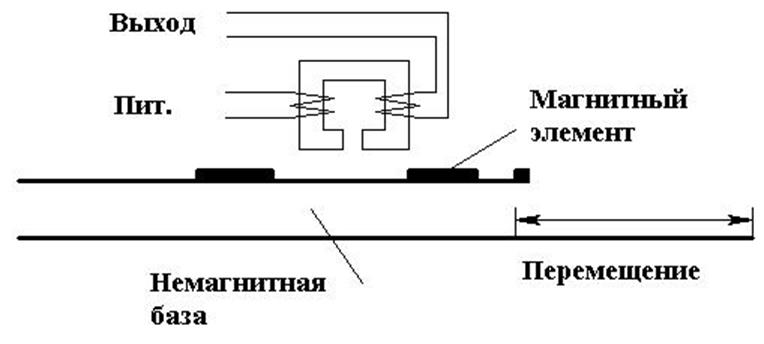
Рис. 23
Работа кодирующих устройств сводится к тому, что при относительном перемещении считывающего устройства и кодирующей маски (при этом совсем не имеет значения, что именно движется, а что остаётся неподвижным) на выходе считывающего блока выделяется сигнал, структура которого определяется способом построения кодирующей маски, а также типом и назначением самого шифратора.
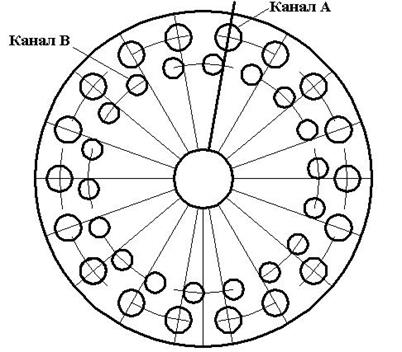
Самым простым кодирующим элементом является диск с выполненными отверстиями вдоль дорожки в виде окружности (канал А на рис. 24).
 При вращении диска на выходе схемы считывания появится последовательность
импульсов, частота которых будет пропорциональна скорости вращения диска.
Основная особенность масок такого вида состоит в том, что поворот диска на
некоторое число градусов вызовет появление на выходе определённого числа импульсов.
Но это число импульсов не содержит в себе информации о том, от какого
исходного положения произошло перемещение кодирующей маски, следовательно,
нельзя определить абсолютной координаты достигнутого положения, можно узнать
лишь разделяющее их угловое “расстояние” как приращение, отделяющее
исходное состояние от достигнутого.
При вращении диска на выходе схемы считывания появится последовательность
импульсов, частота которых будет пропорциональна скорости вращения диска.
Основная особенность масок такого вида состоит в том, что поворот диска на
некоторое число градусов вызовет появление на выходе определённого числа импульсов.
Но это число импульсов не содержит в себе информации о том, от какого
исходного положения произошло перемещение кодирующей маски, следовательно,
нельзя определить абсолютной координаты достигнутого положения, можно узнать
лишь разделяющее их угловое “расстояние” как приращение, отделяющее
исходное состояние от достигнутого.
Рис. 24
Даже больше того, число считанных импульсов не давало бы в рассматриваемом случае информации о направлении перемещения, без чего вопрос о применимости такой маски становится излишним. Для начала такую маску надо хотя бы “научить” отслеживать знак приращения.
С этой целью в структуру маски кроме канала А вводится дополнительный канал В, позволяющий получить импульсную последовательность, сдвинутую по фазе относительно канала А на 90° (четверть периода). По сложившейся традиции сигналы, обработка которых производится исходя из соотношения их фаз, называются квадратурными сигналами. Технически квадратурные сигналы можно получить изначально строя маску с оптическим считыванием двухканальной. Другим вариантом может быть усовершенствование уже давно существовавших так называемых синусно-косинусных вращающихся трансформаторов (СКВТ), двухканальный выходной сигнал которых представляет собой две смещённые на 90°синусоиды, которые после компаратора принимают вполне удобный для дальнейшей обработки вид.
Теперь представляется возможным получить информацию о направлении вращения. Из рис. 25 видно, что при вращении по часовой стрелке сигнал В опережает по фазе сигнал А, а при обратном вращении – наоборот. Поэтому если импульсы каналов А и В подать на регистратор, срабатывающий по положительному перепаду сигнала на входе А, то в первом случае мы получим единичный выходной сигнал, а во втором – нулевой. Только при наличии двухканального выхода кодирующее устройство позволяет однозначно характеризовать направление перемещения.
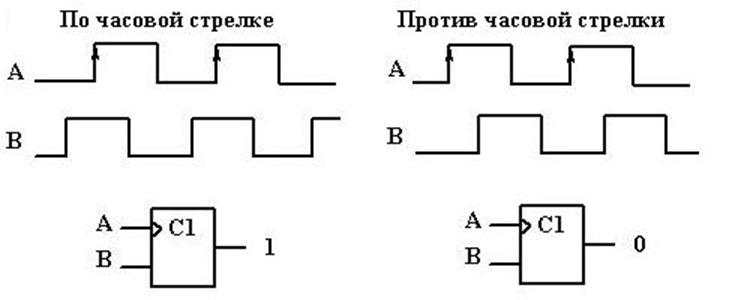
Рис. 25
Таким образом, кодирующее устройство (рис. 24) при наличии двухканального выхода пригодно для использования в качестве шифратора приращений из–за своей способности преобразовывать введённое приращение угла в соответствующее число – импульсное представление. А вот одноканальные (тахометрические шифраторы) могут быть использованы для измерения скорости, но направления перемещения они определять не могут.
2.2. Виды кодирования масок
Казалось бы, что для измерения линейных перемещений хорошо приспособлена линейчатая маска (рис. 26), так как её можно расположить вдоль направляющих перемещения.
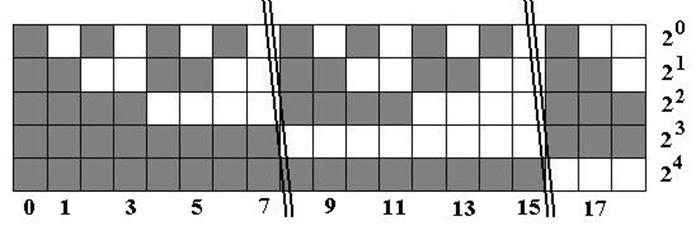
Рис. 26
При этом чаще всего возникает потребность получить её в виде, допускающем определять с её помощью абсолютное значение текущей координаты положения регулируемого органа. Этого можно достичь, если применить один из видов кодирования всех последовательно друг за другом расположенных дорожек. Тогда при любом положении считывающего устройства относительно линейчатой маски и в любой произвольный момент времени значение кода однозначно определит фактическую координату расположения подвижного агрегата – это основной признак, который выделяет абсолютные шифраторы в отдельную группу устройств и отличает их от шифраторов приращений. Если кодовую нулевую позицию маски совместить с началом некоторой системы координат, то дальнейшее определение местоположения объекта в этой системе координат сводится к простому считыванию кода.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.