В однополупериодном двигателе с обмоткой, соединенной в «звезду», ток, протекающий в обмотке, не меняет своею знака. При отпирании транзистора VT1 ток протекает от источника питания Е к общей точке схемы через VT1 и обмотку W3, а при закрытом транзисторе VT1 этот ток отсутствует. По сравнению с двухполупериодными вентильными двигателями временное использование каждой обмотки однополупериодного двигателя вдвое меньше, что несколько уменьшает КПД (отношение входной мощности к механической работе, выполненной двигателем). Однако для однополупериодных двигателей требуется меньшее количество электронных компонентов (транзисторов) и у них более простая схемотехника. По этой причине широкое распространение однополупериодные двигатели получают тогда, когда определяющим показателем является стоимость электропривода.
На рис. 10 показана типичная схема однополупериодного двигателя с обмоткой, соединенной в "звезду", и тремя холловскими интегральными схемами.

Рис. 10.-Основная электрическая схема однополупериодного двигателя с обмоткой, соединенной в «звезду»
Упрощенная схема управления однополупериодным двигателем с обмоткой, соединенной в "звезду", и тремя датчиками Холла показана на рис.11. Такая схема широко применяется для управления мало мощными двигателями с выходной мощностью не более нескольких ватт.
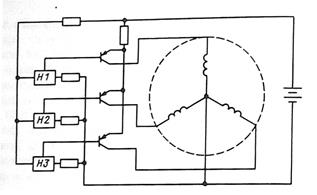
Рис.11.-Упрощенная схема управления однополупериодным двигателем постоянного тока с обмоткой, соединенной в «звезду», Н1-Н3-холловские интегральные схемы.
Четырехфазные вентильные двигатели.
Четырехфазные двигатели, известные под названием двухфазных двигателей двухтактного двигателя с двумя датчиками Холла, получили широкое распространение с момента появления вентильных двигателей постоянного тока. Основная электрическая схема такого двигателя представлена на рис.12. Два датчика Холла Н1 и Н2 сдвинуты в пространстве на 90 электрических градусов по отношению друг к другу.
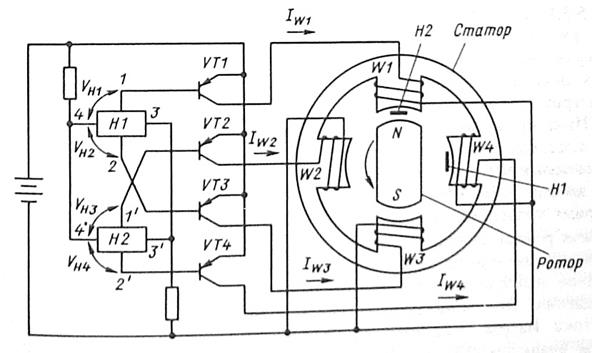
Рис.12.-Основная электрическая схема четырехфазного вентильного двигателя постоянного тока.
Двигатель с электронным регулятором частоты вращения.
На рис. 13 показан четырехфазный вентильный двигатель со схемой регулирования частоты вращения. Противо-ЭДС, наводимая в обмотках двигателя, используется в качестве сигнала обратной связи.
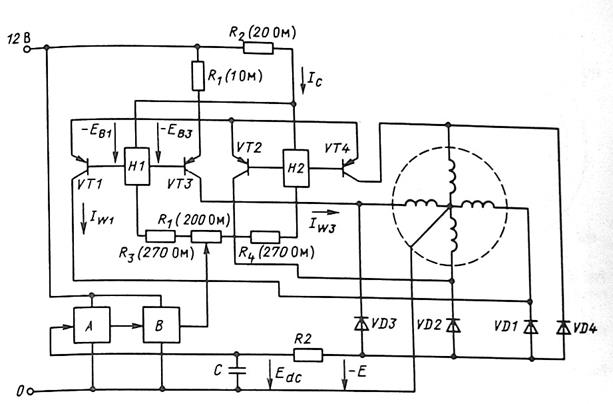
Рис.13.-Схема четырехфазного вентильного двигателя с использованием электронного регулятора частоты вращения и двух датчиков Холла
Для получения характеристик управления четырехфазного двигателя токи в обмотках должны иметь синусоидальную форму. Применение постоянного магнита ротора цилиндрической формы и магнитопровода (ярма) статора кольцевой формы позволяет уменьшить потоки рассеивания.
В рассматриваемом двигателе выходные напряжении двух датчиков Холла именют синусоидальную форму и сдвинуты на 90° по отношению друг к другу, а каждая обмотка питается током намагничивания также синусоидальной формы. Если намагничивающий ток, управляемый датчиком Холла Н1, синусоидальной формы, то намагничивающий ток, управляемый датчиком Н2, будет косинусоидальной формы, поскольку существует разность фаз в 90°. При одинаковых амплитудах двух намагничивающих токов их векторы постоянны. Следовательно, для улучшения качества вращения двигателя угол между магнитным полем и вектором тока должен быть постоянным.
Широко распространены также четырехполюсные двигатели. Если вскрыть четырехполюсный двигатель, то в нем можно увидеть холловские интегральные схемы, сдвинутые на 135º относительно друг друга (рис.14).
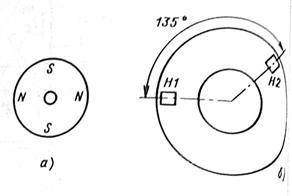
Рис.14.-Размещение датчиков Холла в четырехполюсном двигателе:
а-ротор, б-датчики Холла, S, N-полюса ротора.
Двухфазные вентильные двигатели
Сечение двухфазного двигателя с неравномерным воздушным зазором показано
на рис. 15.
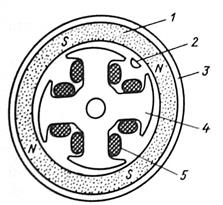
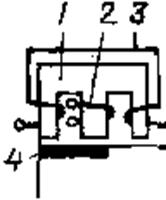
Рис.15.-Сечение двигателя с неравномерным воздушным зазором:
1-ферритовый постоянный магнит, 2-холловская интегральная схема, 3- магнитопровод ротора,
4-магнитопровод статора, 5-обмотка.
Двигатель имеет четыре полюса и характеризуется тем, что содержит неравномерный зазор под полюсами статора, увеличивающийся в направлении часовой стрелки между неподвижными полюсами статора и магнитом ротора. Обмотка состоит из двух катушек, т. е. обмотки первой и второй фаз. Магнитные полярности этих обмоток у каждого из полюсов машины противоположны друг другу. Такой тип обмотки называют бифилярной обмоткой.
Двухфазный двигатель с дополнительными неподвижными полюсами.Двухфазный двигатель такого типа показан на рис 16. Для этого двигателя характерно, что его ротор намагничен в следующей последовательности N-S-O-N-S-O, где буквой О обозначено отсутствие намагничивания, а на статоре расположены дополнительные неподвижные полюса, не имеющие обмоток.
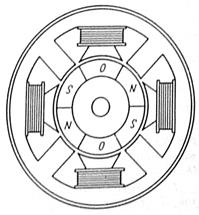
Рис.16.-Двухфазный двигатель с дополнительными неподвижными полюсами:
ротор находится в устойчивом положении.
Положение ротора по рис. 16 близко к такому положению, при котором двигатель находится в покое в обесточенном состоянии. Таких положений покоя восемь, и они располагаются с интервалом около 45° друг за другом. Если схема управления спроектирована так, что фаза А создаст на своих зубцах намагничивание южными полюсами, а положение ротора соответствует изображенному па рис. 16, то момент двигателя при его вращении принимает нулевые значения примерно через каждые 50°. Однако при протекании тока по фазе В двигатель создаст электромагнитный момент, направленный против часовой стрелки и существующий в этом направлении на интервале в 90 . Затем ток опять переключается па фазу А.
Двухфазный двигатель с шагом обмотки меньше 180º.
Шаг обмотки меньше 180º можно
получить с помощью немагнитных зон на постоянном магните. Магнитная структура
ротора и расположение Витов фаз А и В в двигателе с внешним ротором показаны на
рисунке 17.
Особенности конструктивного исполнения и области применения БДПТ.
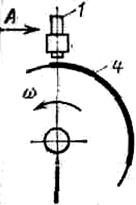
Специфическим элементом БДПТ является блок датчиков, фиксирующих положение ротора (ДПР) или магнитного потока. Существует большое многообразие ДПР. В относительно мощных двигателях наибольшее распространение получили индукционные ДПР.
|
|
|
|
Рисунок 18 – Индукционный датчик положения ротора
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.