Регулирующее воздействие у двухпозиционного регулятора имеет два фиксированных значения и переход с одного значения на другое происходит скачком при некотором значении (значениях) регулируемой величины.
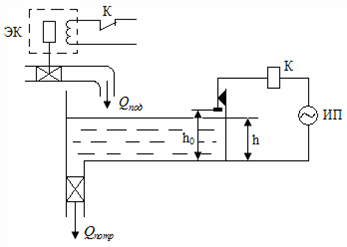
Рис. 22. Система двухпозиционного регулирования уровня жидкости
На рис. 22 приняты следующие обозначения:
ЭК – электромагнитный клапан, управляемый контактом реле К;
ИП – источник питания; h – текущий уровень; h0 – заданный уровень.
Жидкость в резервуаре должна быть электропроводящая.
Для работоспособности двухпозиционного регулятора должны выполняться два обязательных условия:
![]()
![]()
Если h < h0 , то реле выключено и клапан (ЭК) открыт, идет подача жидкости, уровень повышается.
Если h = h0 – реле срабатывает, клапан закрывается, подача прекращается, уровень понижается.
Статическая характеристика регулятора показана на рис. 23:
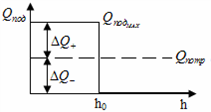
Рис. 23. Статическая характеристика двухпозиционного регулятора
+ΔQ и −ΔQ – показывают, насколько подача больше/меньше потребления.
Характер процесса регулирования имеет вид (рис. 24):
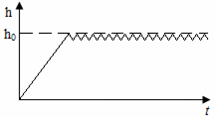
Рис. 24. Процесс двухпозиционного регулирования
Достоинство процесса регулирования – высокая точность поддержания уровня. Недостаток процесса регулирования – низкая надежность, т.к. из-за частого срабатывания реле и клапан (ЭК) быстро выйдут из строя.
Если учесть суммарное запаздывание τ реле и клапана, то получим увеличение амплитуды колебаний и уменьшение их частоты (рис. 25).
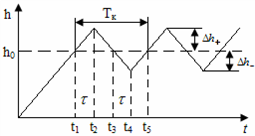
Рис. 25. Процесс двухпозиционного регулирования с учетом запаздывания
Непременным свойством процесса регулирования в системе с двухпо-зиционным регулятором являются автоколебания регулируемой величины, т.е. колебания постоянной амплитуды и частоты, что является основным не-достатком такой системы. Достоинством ее является простота и дешевизна.
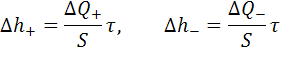
Оценим параметры
автоколебаний с учетом запаздывания в системе, используя уравнение динамики
объекта, где S – площадь зеркала жидкости, h – текущий уровень
жидкости. ![]()

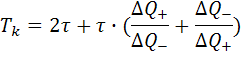
Условие симметричности автоколебаний: ![]()
Учитывая, что реальное запаздывание в такой системе будет мало (десятые доли секунды), частота автоколебаний будет по соображениям надежности недопустимо велика, поэтому схема с одним датчиком уровня практически непригодна. Рассмотрим улучшенную схему системы (рис. 26).
Если h < h0 , то реле К1, К2 и К3 выключены, клапан (ЭК) открыт, уровень жидкости повышается.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.