Σ1 – сумматор №1 – формирует сигнал рассогласования (Δ).
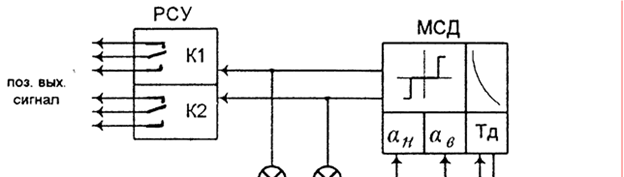
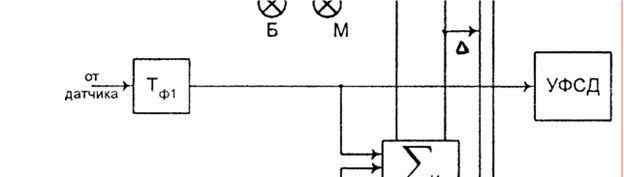
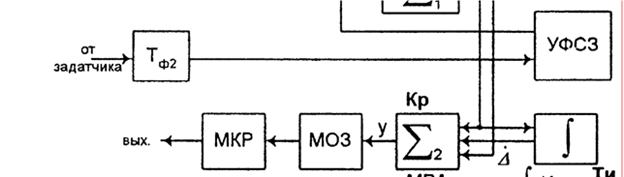
Рис. 49. Схема аналогового регулирующего блока РПА-1
Модуль сигнализации и дифференцирования (МСД) обеспечивает ог-раничение сигнала по нижнему и верхнему уровню ( ан и ав ), дифференциро-вание сигнала и настройку параметра ПИД-закона (время предварения Тд). На его выходе включены сигнальные лампочки (Б, М).
Время изодрома Ти настраивается в интеграторе ∫.
Коэффициент регулятора Кр настраивается в сумматоре №2 – Σ2, формирующем ПИД-закон:
Реле К1, К2 сигнализации и управления (РСУ) формируют позиционный выходной сигнал.
Модуль ограничения и запоминания (МОЗ) ограничивает сигнал по верхнему и нижнему уровню, а также компенсирует дрейф нуля интегратора.
Модуль кондуктивного разделения (МКР) позволяет формировать сигнал на исполнительный механизм по току или по напряжению и инвертировать сигнал.
К цифровым системам многоточечного регулирования температуры для машин химических волокон относятся:
– система, работающая с неподвижными объектами (например, в машине ТВ-1);
– система, работающая с вращающимися объектами (например, в машине ФС-1000 КП-18).
Рассмотрим систему, работающую с неподвижными термопласти-фикаторами. Данная система приведена на рис. 55.
В машине находятся n-объектов с датчиками (терморезисторами) (Rt1÷Rtn), каждый из которых включен в мост переменного тока. Сигнал разбаланса моста проходит через усилитель переменного тока (Ус), выпрямитель (В), бесконтактный распределитель и аналого-цифровой преобразователь (АЦП), где преобразуется в код напряжения. Затем, вместе с сигналом цифрового задатчика (ЦЗ), через устройство ввода-вывода (УВВ) подается в процессор (Проц), где происходит формирование сигнал рассогласования по каждому из объектов и вычисление регулирующего воздействия в соответствии с любым запрограммированным законом регулирования. Процессор формирует сигнал на переключение распределителя и через УВВ управляет
тиристорными преобразователями (ТП), которые обеспечивают включение и отключение питания нагревателей объектов.
Рис. 55. Цифровая система многоточечного регулирования температуры
Рассмотрим подробнее этапы обработки сигнала в системе.
1 – преобразование сигнала разбаланса моста в АЦП;
2 – формирование кода температуры по характеристике датчика, его запоминание по данному объекту, переключение распределителя;
3 – формирование сигнала рассогласования;
4 – вычисление регулирующего воздействия в соответствии с выбранным законом;
5 – преобразование регулирующего воздействия во временные интервалы (интервалы вкл/выкл нагревателей).




Формирование интервалов открытого состояния тиристорного ключа (пропускания в нагреватель синусоид сетевого напряжения) основывается на использовании базовой пачке синусоид: 16, 32, 64, 128, 256. В зависимости от вычисленного регулирующего воздействия будет пропускаться то или иное количество синусоид из пачки.
Пусть пропускание всей пачки синусоид обеспечивает мощность на-гревателя 1600Вт, тогда одна синусоида из 16 будет давать мощность 100Вт, одна из 32 – 50Вт, одна из 64 – 25Вт, а одна из 256 – 6.25Вт. Регулирующее воздействие оказывается квантованным по уровню.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.