 (13)
(13)
Из сравнения
выражений (9) и (13) видно, что нелинейность дифференциального преобразователя
существенно меньше, поскольку определяется квадратом ![]() .
Из (13) для заданного значения находим
.
Из (13) для заданного значения находим
 ,
(14)
,
(14)
а из (9), пренебрегая членами выше первой степени, получим:
 .
.
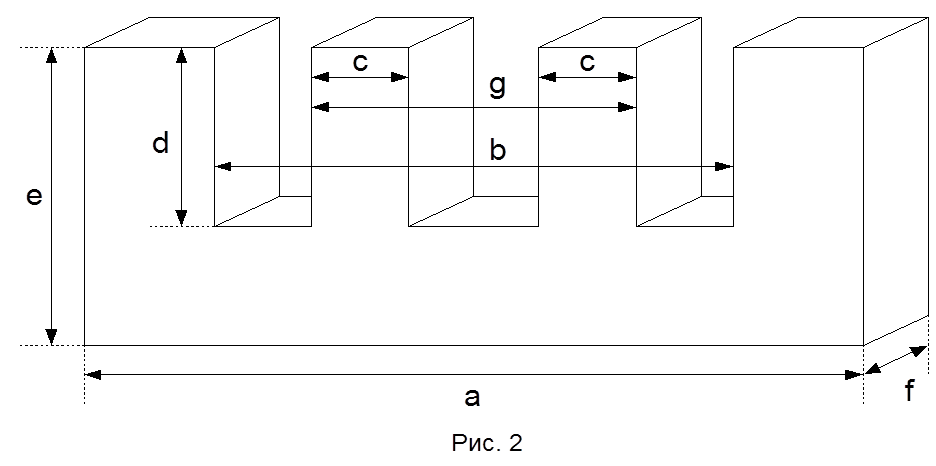
На Рис. 6 показан общий вид сдвоенного Ш-образного магнитного сердечника. Основные параметры приведены в таблице 1.
Таблица 1.
|
Параметр |
Значение |
|
a |
36 мм |
|
b |
26 мм |
|
c |
10 мм |
|
d |
13 мм |
|
e |
18 мм |
|
f |
10 мм |
|
g |
15 мм |
|
Марка феррита |
2000 НМI |
|
Эффективная длина магнитной линии |
12 |
|
Площадь окна |
2,1 |
Зависимость изменения значений катушек индуктивности от величины воздушного зазора между сердечником и якорем рассчитывается по следующей формуле:
 (15),
(15),
где
 ;
;
W – количество витков, W=138;
![]() =60
=60 ![]() ;
; ![]() =40…320 мкм.
=40…320 мкм.
Подставив
в формулу (15) значения ![]() получим
некоторые значения катушек индуктивности (Табл. 2).
получим
некоторые значения катушек индуктивности (Табл. 2).
|
|
40 |
18 |
100 |
7,175 |
150 |
4,78 |
250 |
2.87 |
320 |
2,25 |
 (16),
(16),
где
![]() , а
, а ![]() .
.
![]()
 (17).
(17).
Подставив в формулу (17) значения индуктивностей из таблицы 1, видно, что величина сопротивления меняется в пределах от 9 мОм до 80 мОм. Результаты показаны в таблице 3.
|
|
R, Ом |
18 |
0,089 |
7,175 |
0,21 |
4,78 |
0,39 |
2.87 |
0,56 |
2,25 |
0,79 |
3.10. Блок преобразования постоянного напряжения в меандр.
Блок преобразования постоянного напряжения в меандр. Используется для преобразования постоянного стабилизированного напряжения в напряжение, которое имеет форму меандра, чтобы устранить возникновение контактных ЭДС (для мостовой схемы в узловых точках, где соединяются различные проводники, при воздействии температуры возникают термоэлектрические напряжения – термоЭДС). Это приводит к самопроизвольному изменению напряжения на выходе мостовой схемы, не зависящему от изменения измеряемой силы, поэтому, если питание мостовой схемы осуществить постоянным током, то изменение температуры может вызвать смещение нуля, т. е. возникает дополнительная аддитивная погрешность, вызванная термоЭДС). Состоит из: интегрального стабилизатора, усилительного каскада, ключевой микросхемы, мультивибратора, триггера.
1. Интегральный стабилизатор на 6 В, он представляет собой систему регулирования, в которой с заданной точностью поддерживается постоянным напряжение на выходе независимо от изменения входного напряжения и тока нагрузки. Он используется для задания амплитуды напряжения для мостовой схемы (эта величина будет в дальнейшем рассчитана);
2. Мультивибратор – генератор прямоугольных импульсов. Он задает период изменения напряжения из положительного в отрицательное. Частота должна лежать в пределах 5 кГц до 20 МГц, если она меньше этого диапазона, то будет происходить сильная дискретизация сигнала, если меньше – будет происходить влияние высокой частоты на распределенные параметры цепи;
3. Триггер, т.к. мультивибратор имеет не идеальную характеристику преобразования, поэтому после него ставится триггер, который делит частоту следования импульсов мультивибратора на 2, в итоге получаем сигнал со скважностью равной 2;
4. Ключ на МОП транзисторах с управлением - управляется сигналом триггера;
5. Усилительный каскад состоит из 4-х усилителей (2-х операционных и 2-х на биполярных транзисторах) он выполняет функцию усиления по току, т. к. на выходе ключевой микросхемы низкий уровень тока, а для работы моста необходим гораздо больший ток (его величина рассчитана ниже);
3.10.1. Расчет мультивибратора.
В современной цифровой аппаратуре очень часто используются генераторы тактовых импульсов со скважностью 50 %, часто называемые генераторами меандра. Такие генераторы удобно строить на таймерах в режиме мультивибратора [2].
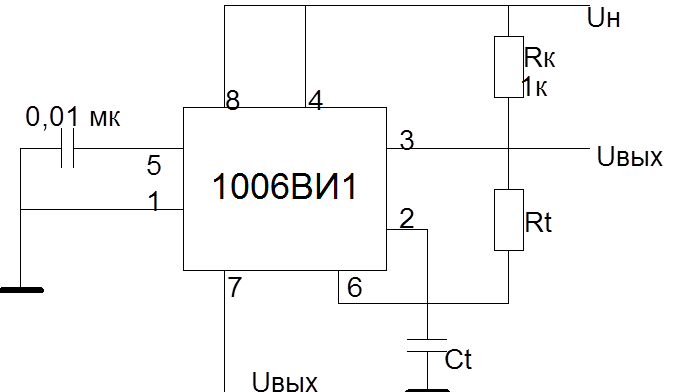
Рис. 3. Мультивибратор.
В связи с тем, что времязадающая цепь управляется выходным напряжением таймера, между выводом 3 и источником питания включен резистор Rн, позволяющий увеличить размах выходного напряжения почти до Uп. Высокая точность при формировании меандра получается благодаря тому, что заряд и разряд конденсатора Сt осуществляются через резистор Rt. На точность влияют стабильность высокого и низкого уровней выходного напряжения и их симметричность относительно пороговых напряжений Uп/3 и 2Uп/3. При рекомендуемом Rн=1 кОм сопротивление резистора необходимо выбрать из условия (15)
Rt>>Rн, (15)
т.е. Rt>10 кОм. Частота выходного сигнала рассчитываем по формуле (16)
fм= (16)
(16)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.