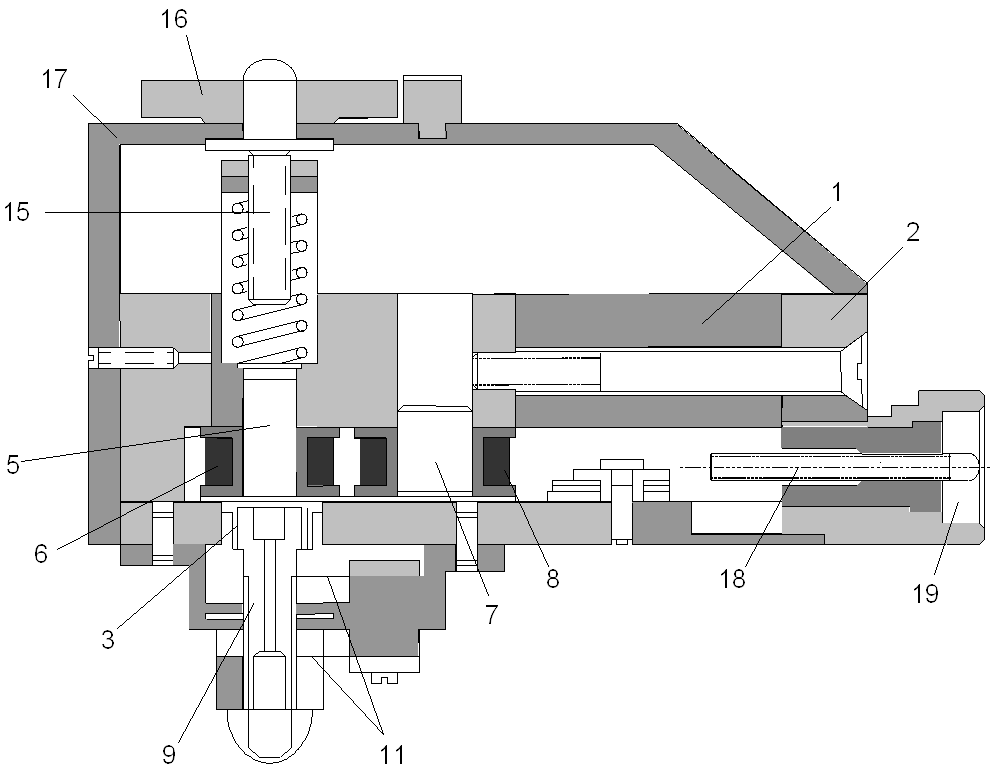
Рис. 3. Устройство преобразователя индукционного профилометра.
Обе катушки – рабочая с переменным зазором в магнитной цепи и компенсационная с постоянным зазором между сердечником и дном корпуса – включены последовательно. ЭДС преобразователя равна сумме ЭДС обеих этих катушек.
При измерениях преобразователь ставится на сменные шаровые опоры 12, укреплённые на мостике 13. Мостик крепится к скобе 14, перемещаемой вверх и вниз микрометрическим винтом 15 с лимбом 16, монтированным на крышке 17. Перемещение опор необходимо для регулирования начального выдвижения иглы 10 и натяжения пружин 11 при измерении чистоты плоских и цилиндрических поверхностей разных радиусов.
Конец катушки 6 соединён с корпусом, а конец катушки 8 выведен на штепсель 18, находящийся в коаксиальном разъёме 19.
Допустимая погрешность прибора
составляет ![]() %. Измерительное усилие на иглу равно
примерно 0,2 Г на 1 мкм вертикального перемещения иглы. [5]
%. Измерительное усилие на иглу равно
примерно 0,2 Г на 1 мкм вертикального перемещения иглы. [5]
3.5. Механотронные профилометры.
Конструкция механотронного преобразователя приведена на рисунке 4.
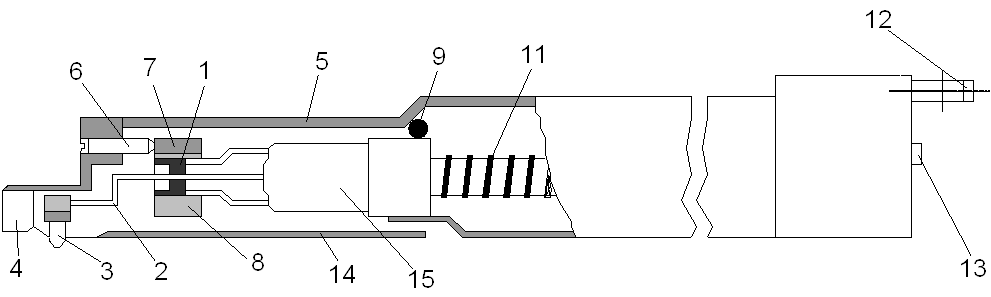
Рис. 4. Устройство преобразователя механотронного профилометра.
Механотрон – электровакуумный прибор, управление силой электронного или ионного тока в котором осуществляется непосредственно механическим перемещением его электродов.
Алмазная игла 3 закреплена на конце щупа 2, соединённого через мембрану 1 с подвижным анодом электронной лампы 15. Эта лампа установлена в корпусе 5 с помощью кольца 8 со штырём 7, который упирается в винт 6. Лампа-механотрон прижимается к корпусу преобразователя пружиной 11. Для защиты алмазной иглы 3 на передней части корпуса расположена опора 4. положение алмазной иглы со щупом 2 регулируют двумя винтами 9, воздействующими на кольцо. Снизу механотрон защищён крышкой 14. В корпус профилометра преобразователь устанавливают с помощью штырей 13 разъема и фиксируют штифтом 12.
При перемещении алмазной иглы по контролируемой поверхности колебание иглы передаётся через щуп и мембрану на подвижный анод механотронного преобразователя, что вызывает изменение выходного сигнала. Этот сигнал подаётся на электронный блок профилометра.
Механотроны, обладая высокой чувствительностью и сравнительной простотой устройства, оказались недостаточно надёжными в работе и в последних моделях профилометров их стали заменять индуктивными преобразователями. [3]
3.6. Индуктивные профилометры.

Принципиальная схема индуктивного преобразователя приведена на рис. 5. Магнитную систему преобразователя образует сдвоенный Ш-образный магнитный сердечник 4 с двумя катушками 3 и якорь 2. Катушки преобразователя и две половины первичной обмотки входного дифференциального трансформатора 6 составляют электрический мост, питание которого осуществляется от генератора 5 синусоидального напряжения частотой 10 кГц. Алмазная ощупывающая игла 1 со щупом закреплена на якоре 2 дифференциального индуктивного преобразователя. Сила воздействия иглы 1 на контролируемую поверхность контролируется пружиной. Магнитная система жёстко закреплена в корпусе преобразователя и защищена экраном.
В процессе измерения преобразователь перемещается параллельно контролируемой поверхности. Алмазная игла, ощупывая неровности контролируемого изделия, вместе с якорем совершает колебания. Сигнал, снимаемый с катушек, зависит от зазора между сердечником и якорем, расположенным на плоской пружине, защемлённой в корпусе преобразователя. Выходные сигналы мостовой измерительной схемы поступают на трансформатор, а затем на АЦП.
Полное электрическое сопротивление преобразователя, можно записать в виде:
 , (3)
, (3)
где R – сопротивление обмотки по постоянному току.
Поскольку
полное магнитное сопротивление ![]() носит комплексный
характер, то:
носит комплексный
характер, то:
 ,
(4)
,
(4)
где ![]() – магнитное сопротивление воздушного
зазора.
– магнитное сопротивление воздушного
зазора.
Учитывая,
что  ,
,
 ,
(5)
,
(5)
где ![]() – длина воздушного зазора;
– длина воздушного зазора;  – магнитная проницаемость воздуха; s – площадь
воздушного зазора.
– магнитная проницаемость воздуха; s – площадь
воздушного зазора.
Из
выражения (5) следует что полное сопротивление преобразователя нелинейно
зависит от величины воздушного зазора ![]() .
Пренебрегая сопротивлением обмотки постоянному току, для относительного
изменения сопротивления преобразователя, вызванного относительным изменением
длины воздушного зазора, получим:
.
Пренебрегая сопротивлением обмотки постоянному току, для относительного
изменения сопротивления преобразователя, вызванного относительным изменением
длины воздушного зазора, получим:
 ,
(6)
,
(6)
где  – относительное изменение длины
воздушного зазора;
– относительное изменение длины
воздушного зазора; ![]() – начальное магнитное
сопротивление воздушного зазора.
– начальное магнитное
сопротивление воздушного зазора.
При ![]()
 (7)
(7)
Из
выражения (7) следует, что при весьма малых относительных изменениях длины
воздушного зазора, т. е. При весьма малых перемещениях якоря, зависимость ![]() оказывается практически линейной.
При проектировании преобразователя заданная величина погрешности линейности
является основным ограничением диапазона входных перемещений.
оказывается практически линейной.
При проектировании преобразователя заданная величина погрешности линейности
является основным ограничением диапазона входных перемещений.
Нелинейность можно оценить, разложив выражение (6) в ряд.
 (8)
(8)
Откуда относительная погрешность линейности будет равна:
 (9)
(9)
Для увеличения линейного участка функции преобразования, а следовательно и для увеличения чувствительности и уменьшения погрешностей на практике, как правило, применяют дифференциальные преобразователи. [3]
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.