Допустим, напряжение на входе вольтметра
изменилось с 0 до UНОМ (ступенчато).
В таком случае напряжение на выходе фильтра будет меняться по
закону:  (4).
(4).
Для получения правильного результата нужно дождаться пока выходное напряжение фильтра не приблизится к установившемуся значению.
Допустим, разница между ![]() и
и ![]() будет
равна 1 квант. Посчитаем время, необходимое фильтру для выполнения этого
условия:
будет
равна 1 квант. Посчитаем время, необходимое фильтру для выполнения этого
условия:
 (5), где
(5), где ![]() – время установления фильтра.
– время установления фильтра.
![]() .
.
![]() – число состояний
вольтметра.
– число состояний
вольтметра.
При ![]() =104
– время установления
=104
– время установления ![]() .
.
Увеличение постоянной времени фильтра путем увеличения его сопротивления R ограничено входным сопротивлением фильтра R, тем сильнее будет подавляться полезный постоянный сигнал на входе вольтметра.
Для защиты от НЧ- помех (сетевых используют более сложные режекторные заграждающие фильтры.
Полагая, что входное
сопротивление вольтметра стремится к бесконечности, а выходное сопротивление
источника напряжения стремится к нулю, можно записать передаточную функцию
такого вида: 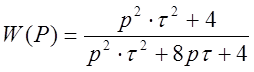 ,
, ![]() .
.
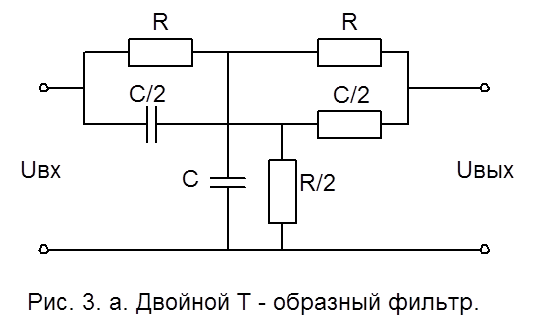
Схема на рисунке 3а представляет собой
6-типлечный мост. При входном напряжении ![]() на
частоте, называемой частотой настройки фильтра, этот мост уравновешен,
следовательно, выходное напряжение фильтра будет равно нулю. Для настройки на
частоту 50 Гц нужно задать постоянную времени фильтра
на
частоте, называемой частотой настройки фильтра, этот мост уравновешен,
следовательно, выходное напряжение фильтра будет равно нулю. Для настройки на
частоту 50 Гц нужно задать постоянную времени фильтра  ,
R =1 кОм, С=6,4 мкФ. Выразим в таблице 1
достоинства Т-фильтра по равнению с НЧ RC-фильтрами.
,
R =1 кОм, С=6,4 мкФ. Выразим в таблице 1
достоинства Т-фильтра по равнению с НЧ RC-фильтрами.
|
|
f , Гц |
|
|
||
|
|
|
||||
|
НЧФ |
300 |
50 |
40 |
2000 |
3500 |
|
ГТФ |
6,4 |
50±4,5 |
46 |
80 |
140 |
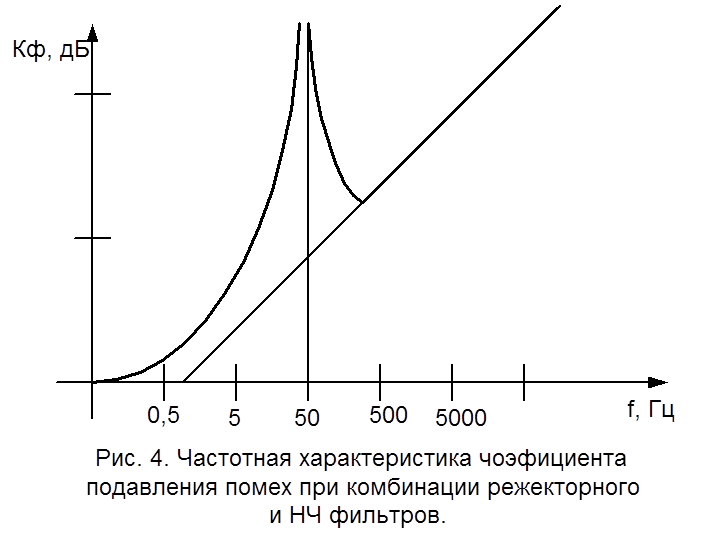
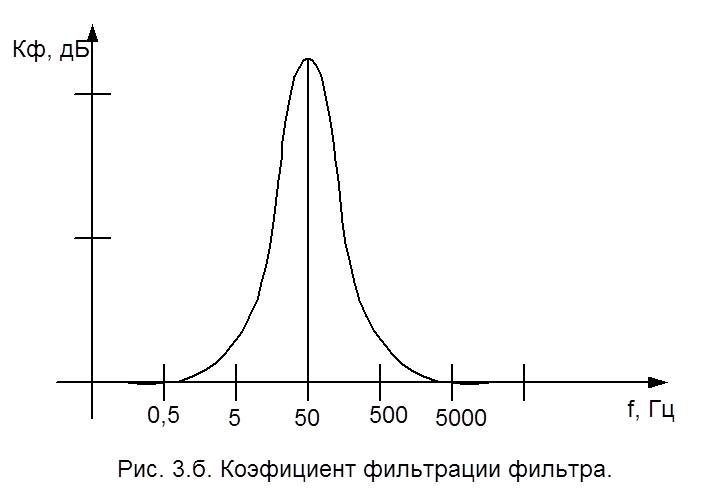
Частотная характеристика коэффициента подавления частотных помех при комбинации режекторного и НЧ-фильтров.
Иногда режекторный фильтр сочетают с НЧ для защиты вольтметра от основной помехи и сетевой, а также различных ВЧ-помех. Также существуют ВУ, включающие в себя набор режекторных фильтров, настроенных на различные гармоники сетевой помехи.
Лекция 20
2.2. Интегрирование.
Идея защиты состоит в том, что интеграл от синусоиды за время, кратное периоду, равен нулю.
 .
.
![]()
![]() =1, 2, 3.
=1, 2, 3.
Т – период синусоиды.
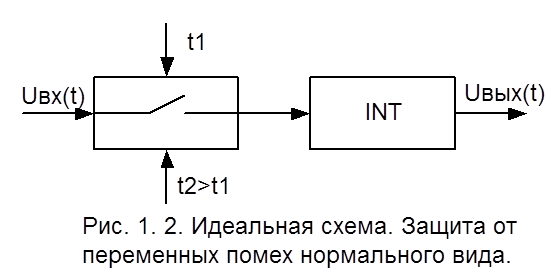
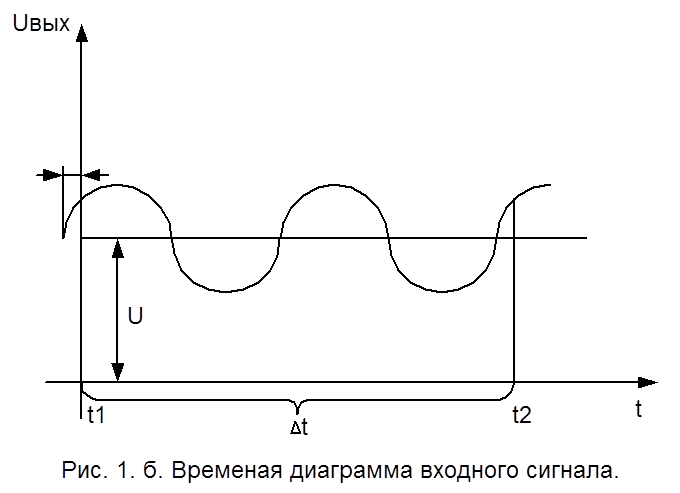
На рисунке 1а имеется идеальный
ключ –k, который
в момент времени t открывается и начинает
подавать измеряемый сигнал ![]() на идеальный
интегратор ИНТ. В момент времени
на идеальный
интегратор ИНТ. В момент времени ![]() , идеальный ключ
запирается и на выходе интегратора получаем выходное напряжение
, идеальный ключ
запирается и на выходе интегратора получаем выходное напряжение 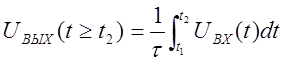 ,
, ![]() –
постоянная интегрирования.
–
постоянная интегрирования.
Сначала предположим, что в начальный момент
времени помехи на входе нет ![]() . В таком случае:
. В таком случае:
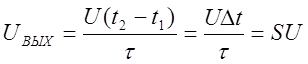 (1), где
(1), где ![]() –
постоянная интегрирования.
–
постоянная интегрирования.
 – коэффициент
преобразования рассматриваемого устройства.
– коэффициент
преобразования рассматриваемого устройства. ![]() .
.
Предположим, что на сигнал положена
синусоида. В таком случае полученный входной сигнал:  .
.
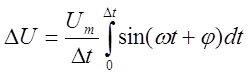 ,
, ![]() – приведенное по ходу изменение
входного напряжения, вызванного помехой.
– приведенное по ходу изменение
входного напряжения, вызванного помехой.
![]() ,
, ![]() =1,2….
=1,2…. ![]() .
.
В этом случае значение формулы (1) совпадает
со значением формулы (2) и помехи как бы нет. Однако выражать интервал
интегрирования точно кратным периоду помехи не удается, поэтому помеху удается
погасить частично. Следовательно, будем использовать понятие переменной помехи
нормального вида![]() .
.
 .
.
Ведем новое обозначение  , где f и T –
частота и период помехи. Из чего получим коэффициент подавления помехи
нормального вида:
, где f и T –
частота и период помехи. Из чего получим коэффициент подавления помехи
нормального вида:
 (3).
(3).
Как видно из формулы (3),![]() зависит от m и
зависит от m и ![]() . Наибольший интерес представляет
минимальное значение коэффициента подавления
. Наибольший интерес представляет
минимальное значение коэффициента подавления ![]() помехи
нормального вида.
помехи
нормального вида.
После известных математических
преобразований получим ![]() :
:
 (4).
(4).
Из данной формулы видно, что минимальный коэффициент подавления помехи нормального вида зависит только от m, то есть пропорционален f , и обратно пропорционален T.
При целых значениях m
имеем ![]() . Это значит, что помеха будет
подавляться бесконечно.
. Это значит, что помеха будет
подавляться бесконечно.
Следовательно, целочисленные значения m
являются наилучшими в подавлении помех. При значениях m =
1,5; 2,5; …. Интеграл помехи будет максимальным ![]() и
в соответствии с формулой (4):
и
в соответствии с формулой (4):
![]() (5).
(5).
Для нахождения наихудших значений m
нужно найти корни уравнения:  , где
, где ![]() буреем из формулы (4).
буреем из формулы (4).
 , m=1,43;
2,46; 3,47.
, m=1,43;
2,46; 3,47.
Подставляя полученные результаты в формулу
(4), получим: ![]() ; 17,8дБ; 20,8дБ….
; 17,8дБ; 20,8дБ….
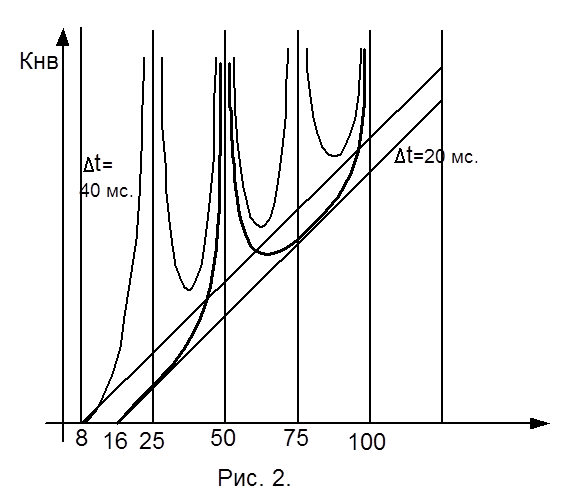
Частотная зависимость коэффициента подавления переменных помех нормального вида имеет вид:
Для повышения ![]() иногда применяют автоподстройку
длительности
иногда применяют автоподстройку
длительности ![]() под период помехи.
под период помехи.
Для защиты от сетевой помехи удобно выбрать ![]() =20мс,40,60,80…., хотя и расположены
выше, они менее эффективны. Однако, для более высокочастотных помех имеет смысл
использовать большие периоды интегрирования, так как частотные характеристики
коэффициента подавления для более высоких периодов, то всплески происходят
чаще.
=20мс,40,60,80…., хотя и расположены
выше, они менее эффективны. Однако, для более высокочастотных помех имеет смысл
использовать большие периоды интегрирования, так как частотные характеристики
коэффициента подавления для более высоких периодов, то всплески происходят
чаще.
Рассмотренный метод подавления помехи нормального вида применяется в так называемых интегрирующих вольтметрах с двухтактным интегрированием и частотно импульсных вольтметрах.
В первых вольтметрах интегрирующий блок является неотъемной частью прибора, а во вторых происходит интегрирование частоты, для чего используется счетчик импульсов.
Лекция 21
Автоматическое переключение и определение полярности.
Наиболее простым методом является автоматическое определение полярности с последующим ее переключением, илипереключением полярности компенсирующего напряжения.
Использование для этих целей реле значительно уменьшает быстродействие, а использование бесконтактных переключателей снижает точность. В случае когда в цифровых приборах используется цифровые счетчики путем усложнения логической схемы прибора непосредственно измеряя входное напряжение любой полярности с последующей индикацией этой полярности.
Автоматическое переключение полярности.
Наиболее часто автоматическое переключение полярности происходит с помощью реле или бесконтактных переключателей транзисторных или тиристорных. Это происходит после выбора предела измерения до начала преобразования напряжения в код.
Автоматическое определение полярности.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.