






Лекция 10
Математическое обеспечение систем управления технологическими процессами
Вопросы:
1. Методы описания алгоритмов управления ТП.
2. Методы поиска оптимальных управляющих воздействий.
Математическое обеспечение подразделяется на алгоритмическое и программное обеспечение. Под алгоритмическим обеспечением понимается совокупность алгоритмов управления и их описания, под программным - программы реализации алгоритмов управления в управляющих ЭВМ.
1. Методы описания алгоритмов управления ТП.
Рассмотрим вначале принятую в теории автоматического управления математическую трактовку понятия оптимального управления. Наилучшее или оптимальное управление может быть определено следующим образом: оптимальное управление технологическим процессом состоит в нахождении управления как функции времени и координат объекта (значений его входных и выходных переменных), которое удовлетворяет заданным ограничениям и обеспечивает экстремальное (максимальное или минимальное) значение критерия качества (целевой функции).
При математическом описании реальных ТП имеет место ряд упрощений и допущений, поэтому реализовать строго оптимальное управление на практике не удается. Можно обеспечить близкое к оптимальному или рациональное управление. Совершенство и эффективность системы управления ТП определяется полнотой и глубиной математического описания как ТП так и самой системы управления. Последовательность логических и вычислительных операций, которые следуют из математического описания задачи управления, называется алгоритмом управления. Таким образом, под алгоритмом понимается точное предписание о выполнении в определенном порядке некоторой системы операций, позволяющее решать задачи заданного типа. Один и тот же алгоритм может быть представлен с различной степенью детализации в зависимости от того, какие операции принимаются за элементарные. Алгоритм должен иметь определенные свойства:
Определенность, что означает невозможность двусмысленного толкования или искажения предписания;
Массовость, т.е. возможность исходить из любых исходных данных, принадлежащих некоторому строго определенному множеству;
Результативность, которая позволяет так реализовать процесс, чтобы через конечное число шагов решения он обязательно приводил к искомому результату. Другими словами можно сказать, что корректно разработанный алгоритм обеспечивает нахождение решения, которое однозначно определяется исходными условиями задачи и непрерывно от них зависит.
Для оценки алгоритмов часто применяют следующие характеристики:
* объем памяти ЭВМ, необходимый для данного алгоритма;
* быстродействие алгоритма, реализованного на ЭВМ определенного типа, т.е. затраты машинного времени на реализацию алгоритма;
* точность алгоритма;
* сложность использования алгоритма;
* пригодность алгоритма для обработки сигналов с различными статистическими характеристиками;
* надежность алгоритма. обеспечивающая гарантию получения результата.
Документация, определяющая процесс управления ТП, называется математическим обеспечением и включает в себя:
* математическое описание ТП (математическая модель процесса);
* функциональная схема алгоритма управления;
* алгоритм управления, определяющий последовательность логических и вычислительных операций для получения требуемого результата;
* программное обеспечение, реализующее алгоритм управления ТП, функции человеко-машинного интерфейса.
Алгоритмы, реализующие методы решения задач управления, требуют постоянного учета фактора времени. При этом алгоритм управления в виде рабочих программ постоянно должен находиться в оперативной памяти управляющей ЭВМ, чтобы быть доступным в любой момент времени, определяемый ходом ТП. Оптимизационные задачи занимают относительно небольшую часть задач управления. Многие задачи сводятся к четкому соблюдению определенной последовательности действий, зависящих от хода ТП, внешних возмущений, характеристик конечного продукта и его составляющих. В основном это логические задачи, поэтому количество логических операций в системах управления ТП занимает около 75% общего объема выполняемых операций.
Необходимо отметить некоторые особенности переменных величин, которые используются в управляющих алгоритмах. Их можно разделить на две группы. К первой группе можно отнести многоразрядные величины, являющимися квантованными значениями измерений некоторых непрерывных физических величин, характеризующих ТП (например, температура, давление, концентрация, величина напряжения, тока и т.п.). Ко второй группе переменных относятся величины, представляющие собой набор малоразрядных признаков, например, перечень возможных режимов работы объекта, условия, определяющие аварийное состояние и т.п. В результате преобразования таких величин по логической схеме получаются резко отличающиеся друг от друга выходные параметры. Очевидно, что надежность определения переменных второй группы должна быть значительно выше, чем для переменных первой группы.
В связи с этим, а также учитывая, что логические операции составляют большую часть в алгоритмах работы систем управления напомним кратко некоторые специальные методы описания логической последовательности действий по управлению ТП.
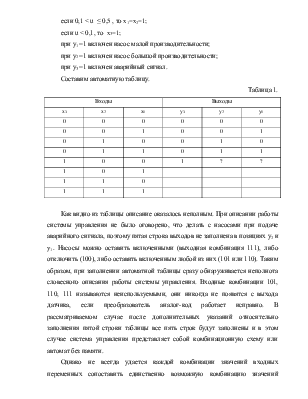
Автоматные таблицы. Это наиболее простой и естественный способ описания логических алгоритмов. При этом все входные переменные x1, x2, ...xn, рассматриваются как двоичные величины, которые могут принимать только два значения 0 или 1 (значению 1 соответствует выполнение некоторого условия, значению 0 - невыполнение этого условия). Если устройство управления имеет n входов и m выходов, то можно составить таблицу, в которой в левой части перечислить все 2n возможных комбинаций входных сигналов, а в правой - 2m комбинаций выходных сигналов. Если всем возможным значениям входной переменной удается сопоставить все значения выходной переменной, то такая система называется автоматом без памяти.
Рассмотрим для примера систему управления, которая должна различно реагировать на изменение уровня жидкости в резервуаре. Многие процессы жидкостной обработки сырья, химические станции приготовления растворов, сооружения по очистке промышленных вод и т.п. обслуживаются системой насосов. Предположим, что система состоит из одного насоса малой производительности и одного большой производительности, включение которых зависит от уровня жидкости в резервуарах. Уровень жидкости измеряется уровнемером широкого диапазона измерений.
Задаем условия работы системы (описание работы системы управления или формализация задачи управления):
если уровнемер показывает нормальный уровень жидкости, насосы не работают;
если уровнемер показывает, что уровень жидкости опустился до u = 1,2 м, то включается насос малой производительности;
если до значения u = 0,8 м, то включается насос большой производительности, а насос малой производительности выключается;
если до значения u = 0,5 м, то включаются оба насоса;
при u = 0,1 м должен быть подан аварийный сигнал.
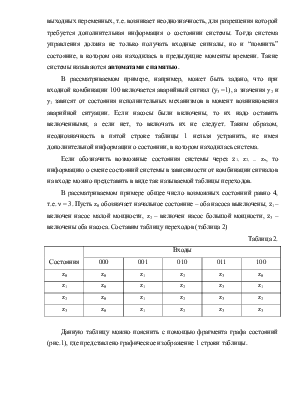
В этом случае вместо одного входа уровнемера x1 можно ввести еще два фиктивных входа x2 и x3. В этом случае имеется восемь (23=8) возможных комбинаций на этих входах: 000, 001, 010, 011, 100, 101, 110, 111. Пяти различным сигналам, поступающим от датчика, можно однозначно поставить в соответствие пять двоичных кодов. При аппаратной реализации системы это означает, что непрерывные показания уровнемера преобразуются в трехразрядное двоичное число (или код). Каждый разряд этого числа можно формально рассматривать как самостоятельный вход. Выходные сигналы y1, y2,… ym также рассматриваются как двоичные переменные.
Уточним обозначения:
если 0,8 < u ≤ 1,2 , то x1=1;
если 0,5 < u ≤ 0,8 , то x2=1;
если 0,1 < u ≤ 0,5 , то x1=x2=1;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.