Работу электропривода в длительном режиме (S1) обеспечивает в программе управления наличие логического блока ВО1 (RS-триггер), который реализует функции реле с самоудержанием. Данный блок также обеспечивает наличие нулевой защиты электродвигателя. Для этой цели у триггера имеется вход Par, по которому производится установка запоминания (сохраняемости) состояния триггера на момент потери питания триггером, а соответственно всем модулем. Если по входу Par было активизировано свойство сохраняемости (Rem = on), то в этом случае не будет реализовано действие нулевой защиты. При отключении свойства сохраняемости (Rem = off) действие нулевой защиты электропривода будет реализовано.
Следует отметить, что исполнение контактов элементов управления и защиты при реализации программы в LOGO! отличается от исполнения контактов этих элементов при реализации схемы управления традиционным способом, релейными коммутационными аппаратами.
Это сделано с целью упрощения и уменьшения объёма программы в LOGO!. Если этого не сделать, то схема содержала бы несколько дополнительных блоков. Такими дополнительными блоками в программе были бы логические блоки, реализующие логическую функцию «НЕ». При составлении программы управления LOGO! всегда следует исходить из того, что с одной стороны необходимо обеспечить как можно меньшее число блоков программы (т.е. обеспечить минимизацию программы), с другой стороны необходимо учитывать наличие исполнения контактов в тех или иных элементах управления и защиты при реализации схемы управления.
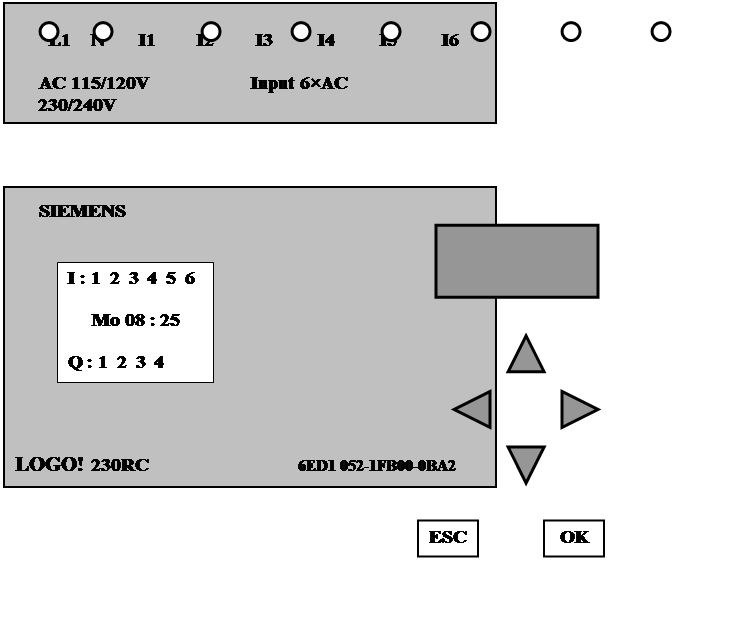
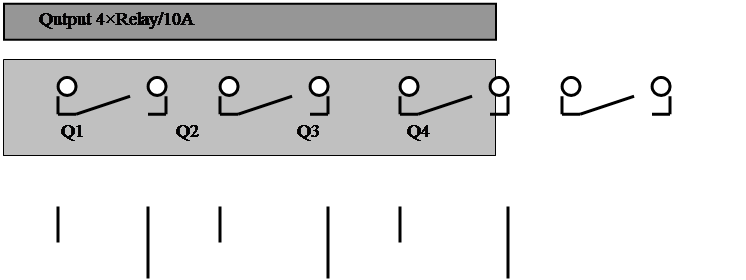
Схема подключения к модулю LOGO!230RC элементов управления и защиты электропривода показана на рисунке 6.6.
6.4 Разработка логической программы управления
реверсивного
электропривода механизма подачи станка
В качестве примера релейно-контакторной схемы управления электроприводом подачи станка может служить схема управления приведённая на рисунке 7.2.
При анализе работы данной схемы управления можно выделить следующие функциональные возможности схемы:
- возможность осуществления дистанционного пуска электропривода;
- возможность осуществления дистанционного останова электропривода;
- возможность осуществления реверса электропривода через кнопку стоп;
- наличие нулевой защиты электропривода;
- наличие защитной блокировки «исключения» реверсивного электропривода.
N L1
![]()
![]()
![]() FU1
FU1
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 |
|
||||||||||||
 |
|||||||||||||
SB2 SB1 KA1 KA2 KA3 KK1
 |
|
 |
![]()
![]()
![]()
![]()
![]() FU2
KM1 HL1 HL2
FU2
KM1 HL1 HL2
Рисунок 6.6 - Схема подключения элементов управления и защиты
к логическому модулю LOGO!230RC
С учётом данных функциональных возможностей разработаем логическую программу управления электроприводом. Для реализации данных возможностей необходимо наличие в программе следующих логических блоков (функций):
- ВО1, ВО3 – реле с самоудержанием (RS-триггер);
- ВО2, ВО4 – блоки реализации логической функции «ИЛИ».
Одним из вариантов данной программы управления будет программа, показанная на рисунке 6.7. При этом следует иметь ввиду, что выполнение данных функциональных возможностей возможно и программой совершенно другой структуры (т.е. программой, содержащей другие логические блоки).
При анализе схемы управления (рисунок 7.2) и логической программы управления (рисунок 6.7) выясняется следующее:
- изменение направления вращения электродвигателя возможно только после нажатия кнопки стоп;
- при нажатой кнопке стоп, пуск двигателя в любом направлении осуществить невозможно.
I1 BO1
|
|
|
![]()
![]()
![]() BO2
BO2
|
![]()
![]()
|
![]()
![]() х
х
 |
![]() I3
I3![]()
|
|
|
![]()
![]() BO4
BO4
![]()
![]()
|
![]()
![]() х
х
![]()
Рисунок 6.7 – Логическая программа управления LOGO!
6.5 Разработка логической программы управления
нереверсивного
электропривода управляемого в функции времени
В качестве примера релейно-контакторной схемы управления электропривода, управляемого в функции времени можно рассмотреть схему управления, приведённую на рисунке 7.5.
При анализе работы данной схемы управления можно выделить следующие функциональные возможности схемы:
- возможность осуществления дистанционного пуска электропривода;
- возможность осуществления дистанционного останова электропривода;
- автоматический останов электропривода через заданный промежуток времени (например, в нашем случае время работы привода должно быть 10 секунд);
- наличие нулевой защиты электропривода.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.