Технологический Университет
Факультет АИТ
Кафедра АПП
|
Красноярск 2000
автоматического регулирования
Цель работы: изучить численные методы анализа переходных процессов, исследовать зависимость качества переходных процессов от параметров системы и её структуры.
 .
.
Анализируя вид передаточной функции, определяем, что в состав системы входят:
интегрирующее звено с передаточной функцией  ,
,
инерционное звено с передаточной функцией  .
.
Общий коэффициент передачи системы К = 1,7.
Постоянная времени в системе Т = 1,0.
Шаг по времени Н = 0,1.
. . .
100 '************************************
110 '** Модуль ввода исходных данных **
120 '************************************
130 PRINT "Введите X – входное воздействие ",
140 INPUT X
150 PRINT "Введите K – общий коэф. усиления",
160 INPUT K
210 PRINT "Введите T – инерционного звена",
220 INPUT TI1
250 PRINT " Введите H – временной шаг расчёта",
260 INPUT H
. . .
700 '******************************************
710 '** Модуль вычисления выходного сигнала **
720 '** элемента сравнения **
730 '******************************************
740 D1 = X - Y:
900 '********************************
910 '** Модуль инерционных звеньев **
920 '********************************
930 LET II1 = D1
940 IO1 = (1 - A1) * II1 + A1 * IO1
1100 '***********************************
1110 '** Модуль интегрирующего звена **
1120 '***********************************
1130 RB1 = RA1
1140 LET RA1 = IO1
1150 R1 = (RA1 + RB1) / 2
1160 RO1 = H * R1 + RO1
1200 '*********************************************
1210 '** Модуль вычисления точек переходного процесса **
1220 '*********************************************
1230 LET Y = K * RO1
1240 T = T + H
. . .
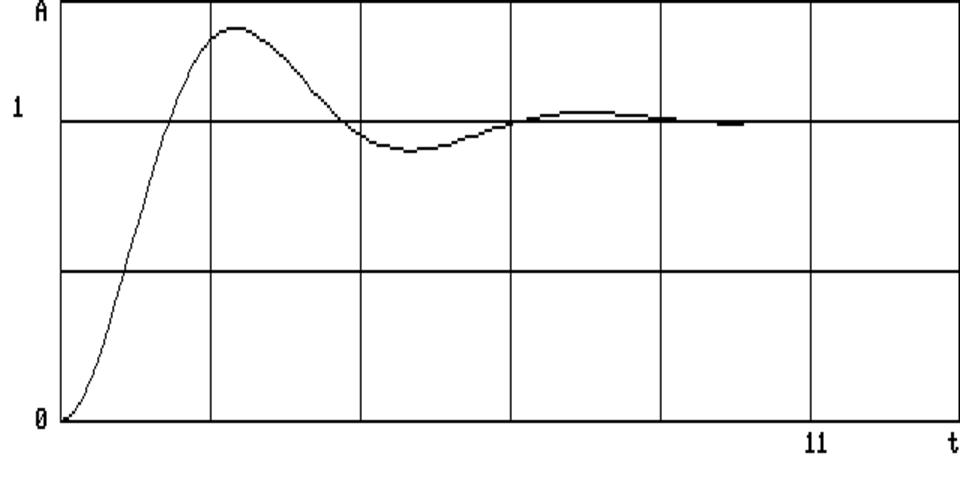 |
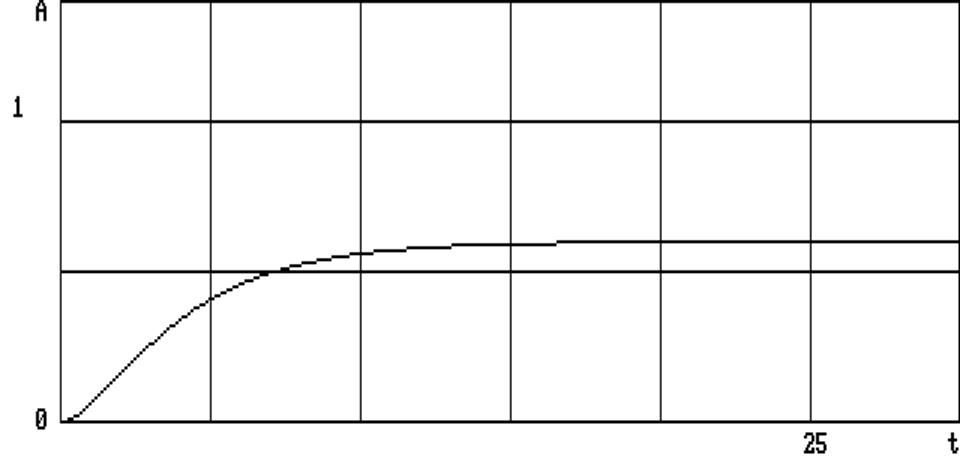
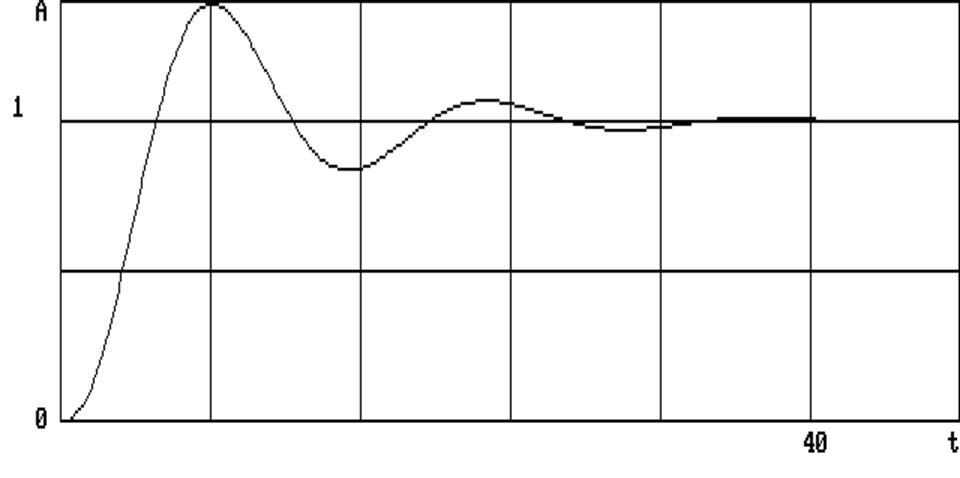
Рис.1.1. Временная характеристика переходного процесса
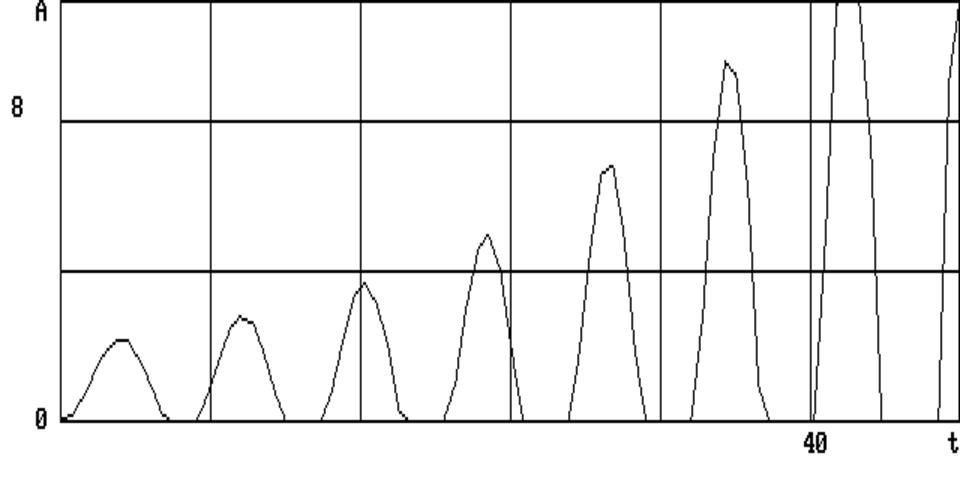 |
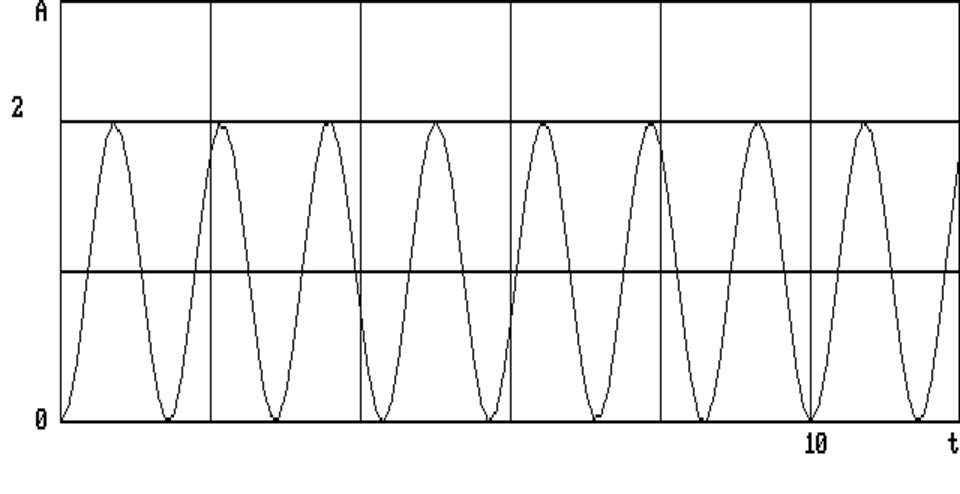
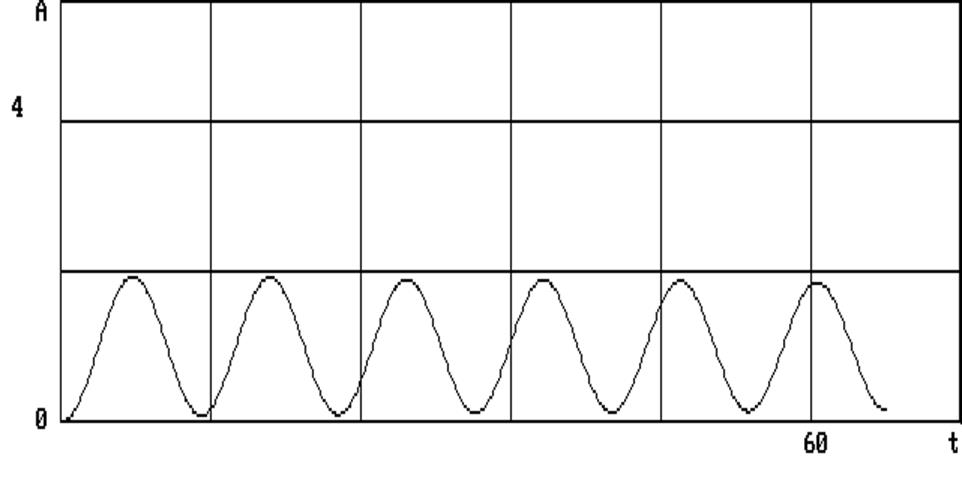
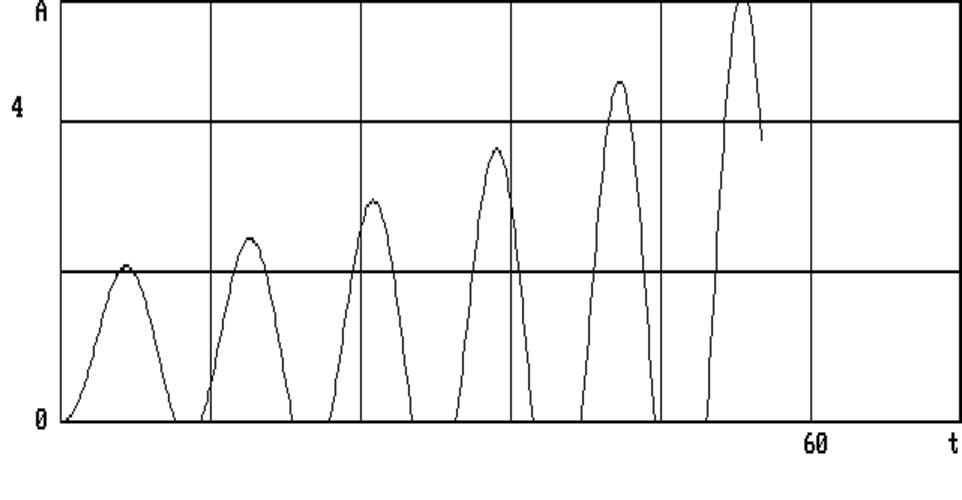
Из рисунка (рис.1.1) видно, что при данных параметрах Т = 1,0 и К = 1,7 система переходного процесса устойчива. С увеличением (рис.1.2) временной постоянной Т = 6, общего коэффициента усиления К = 6 и соответственно временного шага интегрирования Н = 0,6 система вышла за границу устойчивости. С последующим увеличением (рис.1.3) К = 20 при Т = 1,0 и шагом Н = 0,1 система находится на границе устойчивости.
 |
 .
.
Анализируя вид передаточной функции, определяем, что в состав системы входят:
инерционное звено с передаточной функцией  ,
,
инерционное звено с передаточной функцией  .
.
Общий коэффициент передачи системы К = 1,5.
Постоянная времени в системе Т1 = 10; Т2 =1,0 .
Шаг по времени Н = 0,1.
. . .
100 '************************************
110 '** Модуль ввода исходных данных **
120 '************************************
130 PRINT "Введите X – входное воздействие ",
140 INPUT X
150 PRINT "Введите K – общий коэф. усиления",
160 INPUT K
210 PRINT "Введите T1, Т2 – инерционного звена",
220 INPUT TI1, TI2
250 PRINT " Введите H – временной шаг расчёта",
260 INPUT H
. . .
700 '******************************************
710 '** Модуль вычисления выходного сигнала **
720 '** элемента сравнения **
730 '******************************************
740 D1 = X - Y:
. . .
900 '********************************
910 '** Модуль инерционных звеньев **
920 '********************************
930 LET II1 = D1
940 IO1 = (1 - A1) * II1 + A1 * IO1
950 LET II2 = IO1
960 IO2 = (1 - A2) * II2 + A2 * IO2
1200 '*********************************************
1210 '** Модуль вычисления точек переходного процесса **
1220 '*********************************************
1230 LET Y = K * IO2
1240 T = T + H
. . .
 |
Из рисунка (рис.2) видно, что при данных параметрах К = 1,5; Т1 =10,0; Т2 = 1,0 и Н = 0,1 кривая передаточной функции переходного процесса апериодически стремится к величине меньшей по значению величины входного сигнала (Х = 1), что соответствует апериодическому процессу (без перерегулирования). С изменением параметров характер кривой не меняется.
 .
.
Анализируя вид передаточной функции, определяем, что в состав системы входят:
интегрирующее звено с передаточной функцией ,
инерционно - форсирующее звено с передаточной
функцией  ,
,
инерционное звено с передаточной функцией .
Общий коэффициент передачи системы К = 0,5.
Постоянная времени в системе Т = 1,5; Т1 = 1,0; Т2 = 2,0.
Шаг по времени Н = 0,1.
. . .
100 '************************************
110 '** Модуль ввода исходных данных **
120 '************************************
130 PRINT "Введите X – входное воздействие ",
140 INPUT X
150 PRINT "Введите K – общий коэф. усиления",
160 INPUT K
170 PRINT "Введите T, T1 – инерц. – форсир. звена",
180 INPUT TF1, TE1
210 PRINT "Введите T2 – инерционного звена",
220 INPUT TI1
250 PRINT " Введите H – временной шаг расчёта",
260 INPUT H
. . .
700 '******************************************
710 '** Модуль вычисления выходного сигнала **
720 '** элемента сравнения **
730 '******************************************
740 D1 = X - Y:
800 '*********************************************
810 '** Модуль инерционно – форсирующих звеньев **
820 '*********************************************
830 LET FI1 = D1
840 FO1 = (1 - AF1) * FI1 + AF1 * FO1
900 '********************************
910 '** Модуль инерционных звеньев **
920 '********************************
930 LET II1 = FO1
940 IO1 = (1 - A1) * II1 + A1 * IO1
1100 '***********************************
1110 '** Модуль интегрирующего звена **
1120 '***********************************
1130 RB1 = RA1
1140 LET RA1 = IO1
1150 R1 = (RA1 + RB1) / 2
1160 RO1 = H * R1 + RO1
1200 '*********************************************
1210 '** Модуль вычисления точек переходного процесса **
1220 '*********************************************
1230 LET Y = K * RO1
1240 T = T + H
. . .
 |
 |
Из рисунка (рис.3.1) видно, что при данных параметрах Т = 1,5; Т1 = 1,0; Т2 = 2,0; К = 0,5 и шагом Н = 0,1 система переходного процесса устойчива. С увеличением (рис.3.2) общего коэффициента усиления К = 1,15 система находится на границе устойчивости. С последующим увеличением (рис.3.3) К = 1,5 система вышла за границу устойчивости.
 |
 .
.
Анализируя вид передаточной функции, определяем, что в состав системы входят:
колебательное звено с передаточной функцией  ,
,
инерционное звено с передаточной функцией  .
.
Общий коэффициент передачи системы К = 4.
Постоянная времени в системе Т = 1,0; Т1 = 10.
Коэффициент затухания x = 0,4.
Шаг по времени Н = 0,1.
. . .
100 '************************************
110 '** Модуль ввода исходных данных **
120 '************************************
130 PRINT "Введите X – входное воздействие ",
140 INPUT X
150 PRINT "Введите K – общий коэф. усиления",
160 INPUT K
210 PRINT "Введите T1 – инерционного звена",
220 INPUT TI1
230 PRINT "Введите T, x - колебательное звено ",
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.