Министерство образования РФ
Факультет автоматизации и информационных технологий
Лабораторные работы
|
Общие методы программирования решения дифференциальных уравнений
Исследованию подлежит дифф. уравнение вида  .
.
![]() - порядок производной;
- порядок производной;
![]() -
- ![]() -ая производная от
искомой переменной;
-ая производная от
искомой переменной;
![]() -возмущение действующее на систему;
-возмущение действующее на систему;
![]() - коэффициенты уравнения.
- коэффициенты уравнения.
Уравнение описывает поведение объекта под действием возмущающего воздействия.
Правая часть – возмущение, левая часть – сам объект.
Имеется 2 алгоритма решения повысительный и понизительный. Учитывая что повысительный алгоритм имеет не высокую помехозащищённость – им пользоваться не будем. При понизительном алгоритме(метод понижения порядка производной) уравнение разрешается относительно высшей производной и приобретает вид:
 , где
, где  .
.
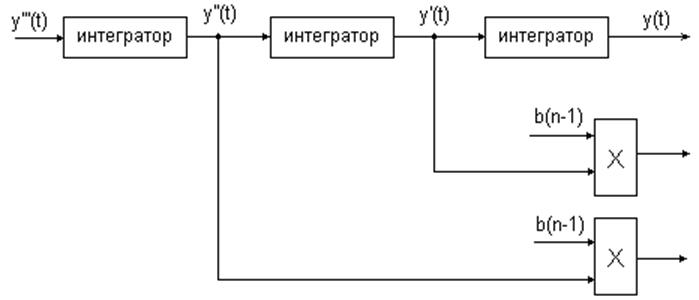
Анализируя левую часть
уравнения можно предложить следующую схему её решения: принимать что значение
функции левой части нам известно, тогда последовательным интегрированием
получим все производные низших порядков в плоть до получения в итоге искомой
переменной ![]() . На модели
данную операцию можно представить в виде цепочки модулей интеграторов,
количество которых равно порядку решаемого дифф. уравнения.
. На модели
данную операцию можно представить в виде цепочки модулей интеграторов,
количество которых равно порядку решаемого дифф. уравнения.
Обратим ся к правой
части уравнения , отметим что она равна n-ой производной ![]() , т.е. можно утверждать что выполнив
операции(математ.) правой части уравнения мы получим значение функции
, т.е. можно утверждать что выполнив
операции(математ.) правой части уравнения мы получим значение функции ![]() .
.
На модели данную операцию
можно представить в виде модуля сумматора на вход которого поступают 2
слагаемых, 1-ое слагаемое равное возмущению действующему на систему, на модели
она может быть представлена в виде спец. модуля – источника возмущения : второе
слагаемое равно сумме  включающую произведение
искомой переменной и её производных до
включающую произведение
искомой переменной и её производных до![]() степени
включительно, на коэффициенты дифф. уравнения разрешённого относительно старшей
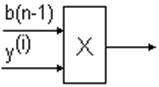
производной. На модели составляющая второго слагаемое могут быть представлены
модулями умножителями, на вход каждого из которых будут поступать значение
коэффициента
степени
включительно, на коэффициенты дифф. уравнения разрешённого относительно старшей
производной. На модели составляющая второго слагаемое могут быть представлены
модулями умножителями, на вход каждого из которых будут поступать значение
коэффициента ![]() и значение производной
и значение производной ![]() .
.
Рассмотренный
алгоритм схему с кольцевой структурой , которая после установки начальных
условий и её возбуждениявозмущением ![]() работает как
единое целоевыдовая на выходе искомую функцию
работает как
единое целоевыдовая на выходе искомую функцию ![]() которая
и подлежит дальнейшему исследованию.
которая
и подлежит дальнейшему исследованию.
Исследование графической модели
Задание
Набрать решение дифференциального уравнения:
y”(t) + a1y’(t) + a0y(t) = f(t).
В качестве исходных значений для исследования принять:
коэффициент а0=10;
коэффициент а1=1;
начальные условия y’(0) = 0;
y(0) = 1;
возмущения действующие на объект :
f(t) = 2Sin80t;
период моделирования 0 – 20 с.
Провести исследование системы при различных значениях параметров.
Решение поставленной задачи
Для решения поставленной задачи будем использовать метод понижения порядка производной. Разработка в несколько этапов:
1. Этап – разрешим уравнение относительно старшей производной
y”(t) = f(t) - a1y’(t) - a0y(t).
Полученое уравнение представляет собой структурную схему в которой каждый элемент математической операции соответствует определённое звено.
2. Этап – средствами SIMULINK соберём блок схему решения левой части последнего уравнения которая должна формировать сигнал производной и выходной переиенной. Представим её в виде цепочки из 2x интеграторов, поскольку данная задача требует рашения с начальными условиями выбираем настройку интеграторовна внешние начальные условия.

Блок – схема решения данного уравнения
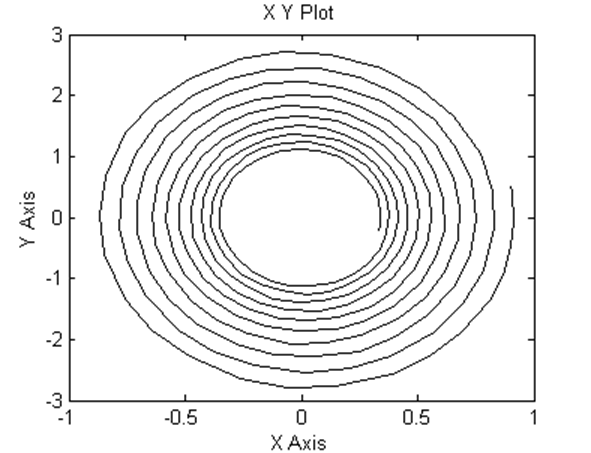
Фазовый портрет (при а1= 0,1)

Фазовый портрет (при а1= 1)
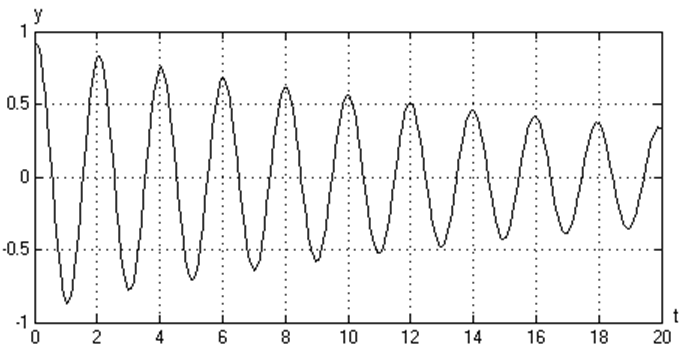
График зависимости y(t) (при а1=0,1, а0=10)
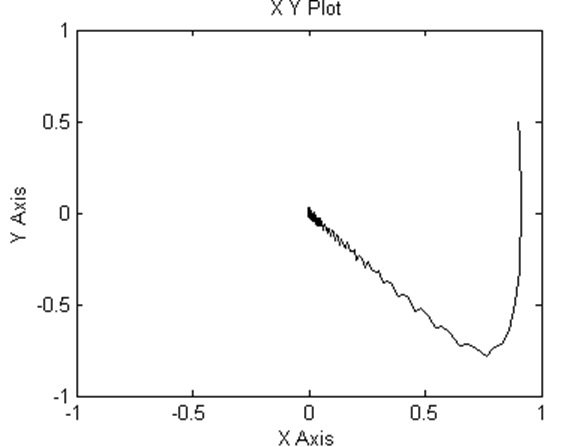
Фазовый портрет (при а1= 10)
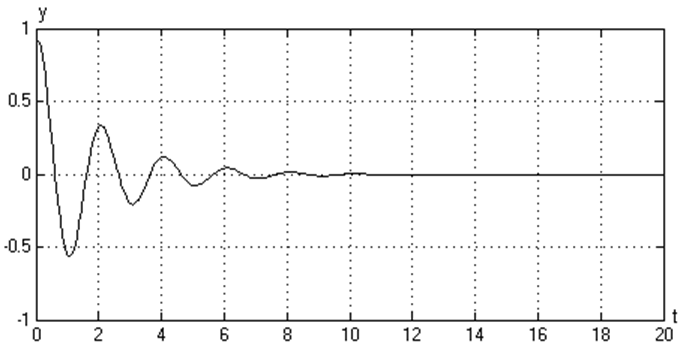
График зависимости y(t) (при а1=1, а0=10)
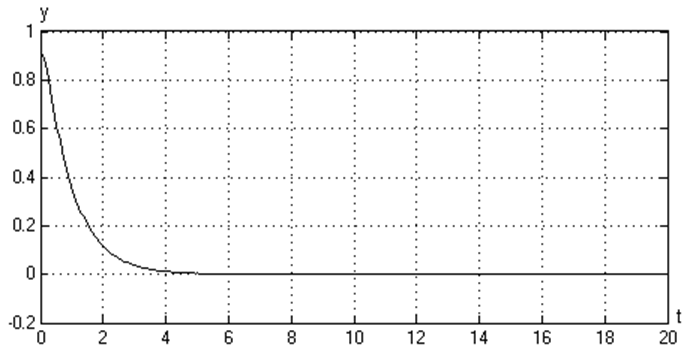
График зависимости y(t) (при а1=10, а0=10)
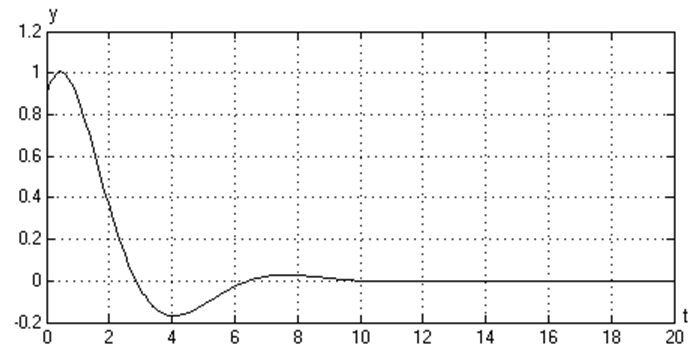
График зависимости y(t) (при а1=1, а0=1)
Модель одноемкостного объекта
Рассматриваются три типовых объекта, которые могут являться объектами регулирования в различных технологических цепочках химического производства: термостат (рисунок 1); емкость, приток и отток которой происходит самотеком (рисунок 2); емкость, приток которой происходит самотеком, а отток при помощи насоса (рисунок 3).
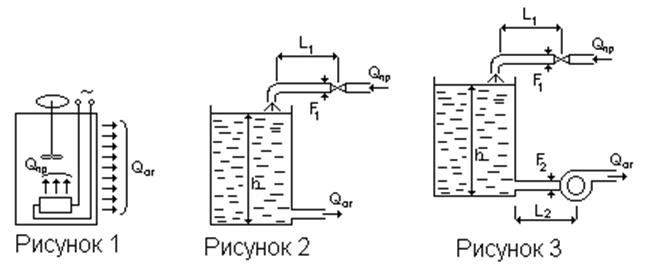
Рисунок 1 – Термостат
Рисунок 2 – Емкость, приток и отток которой происходит самотеком
Рисунок 3 – Емкость, приток которой происходит самотеком, а отток при помощи насоса
Модель А и Б
Модель объекта будем составлять как модель объекта регулирования. При этом в качестве регулируемого параметра в первом случае будет температура жидкости в емкости, а во втором и третьем – уровень жидкости в баке h.
Рассмотрим 1 случая, при котором в качестве регулируемого параметра выступает температура жидкости в емкости.
Запишем уравнение баланса:
![]() .
(1)
.
(1)
В случае нарушения баланса часть энергии соберется в емкости. Уравнение баланса примет вид:
![]() , (2)
, (2)
где Qпр – приток тепла, ккал/с;
Qот – отток тепла, ккал/с;
Q(t) – температура, оС;
С – теплоемкость среды в объекте, ккал/град.
Принимая, что отток тепла зависит от температуры и,
полагая эту зависимость линейной, получим: ![]() .
(3)
.
(3)
где r - коэффициент самовыравнивания, ккал/град.
Смысл названия коэффициента самовыравнивания состоит в том, что в случае если этот коэффициент больше нуля, от объект сам, без внешнего воздействия всегда приходит к некоторому установившемуся состоянию, причем, тем быстрее и тем с меньшей статической ошибкой, чем больше этот коэффициент.
Подставляя уравнение (3) в уравнение (2), получим дифференциальное уравнение, описывающее поведение объекта:
![]() . (4)
. (4)
Преобразуем полученное уравнение к виду:
![]() . (5)
. (5)
Обозначив С/r через То, 1/r через К получим выражение:
![]() , (6)
, (6)
где То – постоянная времени объекта;
К – коэффициент усиления объекта.
Принимая обобщенные обозначения Q(t)=y и Qпр(t)=х, запишем:
![]() . (7)
. (7)
Как видно, моделью одноемкостного объекта может служить дифференциальное уравнение первого порядка.
Нахождение дифференциального уравнения реального объекта
Определяющими переменными для дифференциального уравнения являются величины To, K и x(t).
Постоянную времени технологического объекта можно принимать как отношение объема аппарата (V, м3) к скорости движения рабочей среды через аппарат (v, м/с).
Степень самовыравнивания определяю двумя путами: из анализа физических характеристик процесса или на основании опытных данных. В последнем случае степень самовыравнивания определяют по величине коэффициента передачи объекта:
 ,
,
где уК – конечное значение, которое приобретает измеряемая величина при возмущающем воздействии Х.
Моделирование объекта в Matlab
Создадим 2 примера реализации данной модели в Matlab.
Пример 1
Разрешим уравнение (7) относительно старшей производной:
 .
.
Полученное уравнение в Matlab можно изобразить в виде:
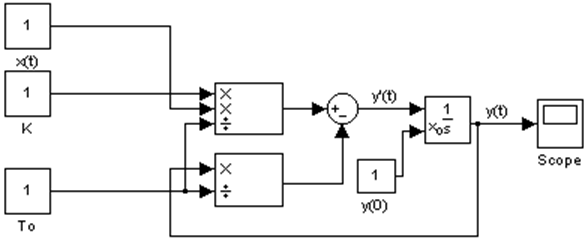
Рисунок 4 – Модель одноемкостного объекта
Пример 2
Запишем передаточную функцию данного объекта:
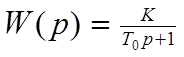 .
.
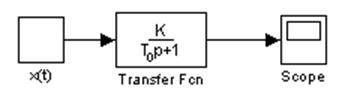 |
Рисунок 5 – Модель одноемкостного объекта
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




