Локационные измерительные устройства позволяют обнаружить предмет, определить его местоположение, осуществить наведение схвата на объект и т.п. Они могут работать на основе светолокационного, ультразвукового и фотонного эффекта. На рис.5.9 приведена функциональная схема светолокационного датчика, где обозначено: Г – генератор; Л – излучатель /инфракрасный светодиод/; ДФ – диафрагма; ФП – фотоприёмник; ИУ - избирательный усилитель; Д - детектор; ПУ – пороговое устройство. Дальность действия датчика 10 -100 мм. Однако он чувствителен к изменению уровня внешней освещённости, отражающей способности объекта, и имеет невысокую точность.
Функциональная схема ультразвукового датчика представлена на рис.5.10. Принцип его действия заключается в акустической локации пространства вблизи схвата. Генератор Г вырабатывает одиночные короткие электронные импульсы высокого напряжения. Эти импульсы через коммутирующее устройство КУ поступают на электрод электростатического капсуля ЭК. Под действием электростатического поля мембрана М капсуля деформируется, излучая в воздух ультразвуковой импульс, который после
|
|
|
|||||||
|
|
||||||
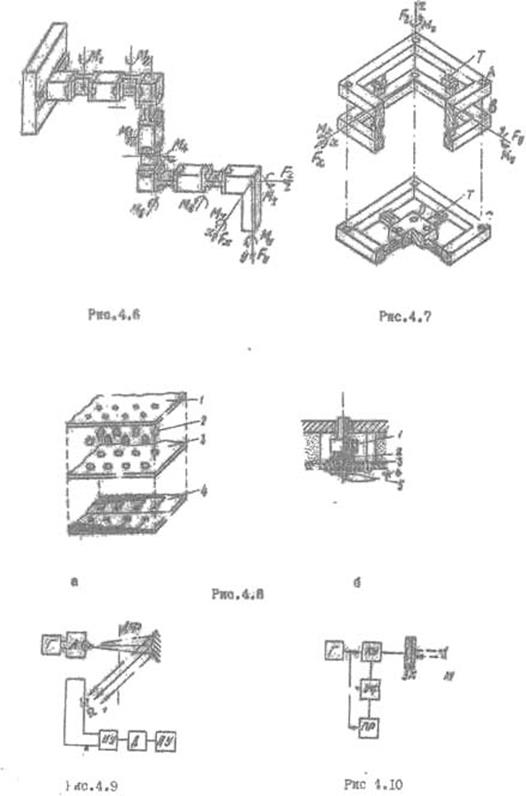
Усиленный и сформированный с помощью устройства формирования УФ импульс поступает далее на преобразователь ПР, формирующий импульс, длительность которого пропорциональна расстоянию до отражающей поверхности. Дальность действия датчика 10 – 1000 мм.
Локационные датчики используются, главным образом, в системах безопасности для предотвращения столкновения элементов робота с посторонними предметами.
Системы технического зрения /СТЗ/ обеспечивают получение изображения рабочей зоны, автоматическую обработку полученной информации и формирование команд управления манипулятором. Такие системы используются для распознавания и сортировки деталей на конвейере, разбора деталей из бункера /из”навала”/, измерения координат положения и геометрических размеров движущихся деталей, выполнения операций сборки и контроля.
СТЗ включает в себя следующие блоки: оптический блок; преобразователь свет-электрический сигнал; устройство обработки и хранения изображения /анализатор/; устройство выработки управляющих воздействий.
Функция оптического блока – фокусировать полученное изображение на экран преобразователя. Этот блок может включать в себя оптические линзы и другие аналогичные элементы.
Функция блока преобразования - трансформация изображения в электрические сигналы. В зависимости от конструкции данного блока СТЗ подразделяются на фотоматричные, телевизионные, построенные на приборах с зарядовой связью /ПЗС/, лазерные и другие.
Фотоматричные СТЗ реализуются наиболее простыми техническими средствами. Чувствительным элементом в этом случае является небольшая матрица фотодиодных элементов размером 16х16 или 32х32. Разрешающая способность таких систем ограничена. Однако для многих технологических задач этого бывает достаточно. К преимуществам фотоматричной системы относится достаточно высокая надежность, малый вес и размеры приемной камеры, возможность установки СТЗ данного типа непосредственно на схвате робота, малое энергопотребление и высокая фоточувствительность, большое быстродействие, объясняющееся параллельным способом считывания информации с элементов матрицы.
Телевизионные СТЗ дают более богатую картину изображения обстановки. Они строятся на базе малогабаритных производственных телекамер с полем 256х256 точек. В этих телекамерах наиболее часто используются видиконы с фотоэлектрическим преобразованием на основе внутреннего фотоэффекта. Процесс преобразования свет-электрический сигнал здесь основан на накоплении заряда на конденсаторах. В процессе развертки электронным лучом освещенных и неосвещенных участков фотомишени видикона образуется сигнал изображения. Видиконы имеют высокую чувствительность, хорошую разрешающую способность и широкий спектральный диапазон.
СТЗ на базе ПЗС имеет матричную структуру чувствительного поля, но, в отличие от фотодиодной системы, данная матрица обладает большей плотностью расположения чувствительных элементов. Матрица ПЗС представляет собой компактный полупроводник – кремневую пластинку, на поверхности которой напылена, как тончайшая сеть, система электродов и нанесено просветляющее покрытие для лучшего поглощения фотонов света. Основным элементом матрицы ПЗС является емкость, образованная электродами, которые расположены в тонком слое диэлектрика, покрывающем поверхность полупроводника.
Устройство обработки и хранения изображения состоит из двух основных частей: устройства предварительной обработки и микро-ЭВМ. Устройство предварительной обработки предназначено для отфильтровывания ненужной информации из полученного изображения, ее сжатия и выделения только существенной части для дальнейшей обработки по заданному алгоритму для распознавания и идентификации объекта. После предварительной обработки полученного изображения и преобразования его в цифровой код информация поступает в микро-ЭВМ, где последовательно выделяются все более общие признаки объектов внешней среды вплоть до формирования модели среды той степени абстракции, которая необходима для решения поставленной задачи. При этом последовательно выделяются контуры объектов внешней среды, затем отделение этих объектов друг от друга, определение их свойств, которые существенны для распознавания и идентификации.
Теоретически существуют несколько методов распознавания и идентификации объекта. Среди них следующие: метод геометрических шаблонов; метод цифровых шаблонов; метод математического анализа; метод “анализа сцен”.
Первый метод наиболее простой и широко применимый. Он основан на использовании имеющихся геометрических шаблонов, с которыми сравнивают объект внешней среды. В самом простейшем случае такое сравнение производится непосредственно на уровне зрительного образа оптическими средствами.
Метод цифровых шаблонов предполагает задание шаблонов аналитически в цифровой форме /в двоичном коде/ и хранения их в памяти ЭВМ. При получении изображения объекта осуществляется преобразование его в цифровой код и сравнение его с цифровой моделью.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.