Преимуществом кодовых датчиков является то, что они относятся к абсолютным датчикам, которые, в отличие от дискретных датчиков, сохраняют информацию о фактической позиции (или координате перемещения) после отключения и включения вновь системы управления или после сбоя в её работе.
Шаблоны разрядов двоичного кода могут быть исполнены различным образом:
1. Проводимые и не проводимые участки для металлических шкал;
2. Прозрачные или не прозрачные участки для стеклянных шкал;
3. Магнитные или не магнитные участки для шкал из не магнитных материалов.
В первом варианте для считывания координаты используются контактные щётки по каждой дорожке. Однако, такой способ очень ненадёжен и практически в настоящее время не используется на практике.
Во втором варианте для считывания координаты с одной стороны шкалы устанавливается источник света, а с другой – по каждой дорожке свой фотоэлемент. Сигнал на фотоэлементе генерируется, когда против него находится прозрачная область шкалы.
Для третьего варианта применяются специальные магнитные головки.
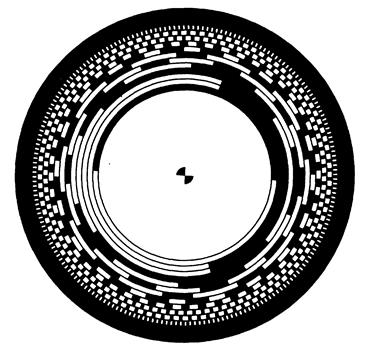
Пример диска кругового кодового датчика представлен на рис. 3.3.7. Каждое концентричное кольцо диска включает затемнённые и прозрачные (или проводимые и не проводимые, или магнитные или немагнитные) участки и соответствует определённому разряду: наружное кольцо – первому разряду, следующее кольцо – второму разряду и т. д.
На рис. 3.3.8. представлен пример типичного линейного кодового датчика.
|
|
|
|
|
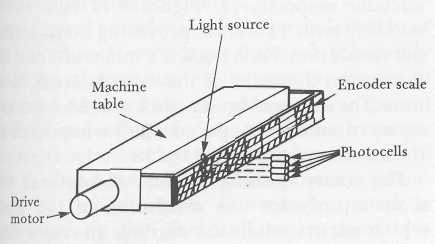
Рис. 3.3.8. Схема работы линейного оптического кодового датчика
Кодовая шкала смонтирована сбоку стола на всей его длине. Считывающая головка зафиксирована на неподвижной части станка и имеет источник света с одной стороны кодовой шкалы и фотоэлементы с другой стороны.
При использовании датчиков такого типа возникает проблема обеспечения заданной разрешающей способности при заданной длине перемещения. Например, при длине перемещения 819,2 мм для получения разрешающей способности 0,1 мм необходимо иметь 14 дорожек (14 двоичных разрядов) и, следовательно, разместить 14 фотоэлементов. Кроме того, в простой двоичной системе на границе, при переходе из одной позиции в соседнюю позицию, может возникнуть ошибка при срабатывании фотодиодов. Например, при переходе от 7 на 8 могут сработать все фотодиоды четырёх дороже, которые представляют позицию 15 (Рис. 3.3.9.а). Для преодоления этой проблемы используют дополнительную дорожку, устраняющую неоднозначность считывания, так как в этом случае фотодиоды срабатывают по переднему фронту маркеров этой дополнительной дорожки, которые сдвинуты и значительно тоньше основных маркеров (Рис. 3.3.9.б).
Другим решение устранения проблемы неоднозначного считывания является использования специального, так называемого, кода «Грея» (Рис. 3.3.9.в), где на каждой границе меняется только один маркер.
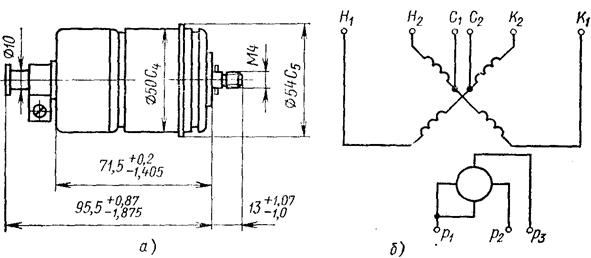
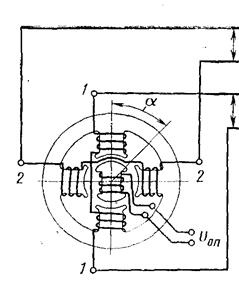
Аналоговые датчики, работающие в основном на принципе электромагнитной индукции, имеют на выходе сигнал в виде какого-либо физического аналога, например, величину напряжения или фазовый сдвиг по отношению к опорному сигналу. Среди аналоговых датчиков обратной связи по положению большое распространение находят круговые датчики типа «вращающегося трансформатора», включенные в фазовом режиме (так называемые «резольверы»). Общий вид и схема работы такого датчика представлена на рис. 3.3.10.
|
|
|
|
|
|
|
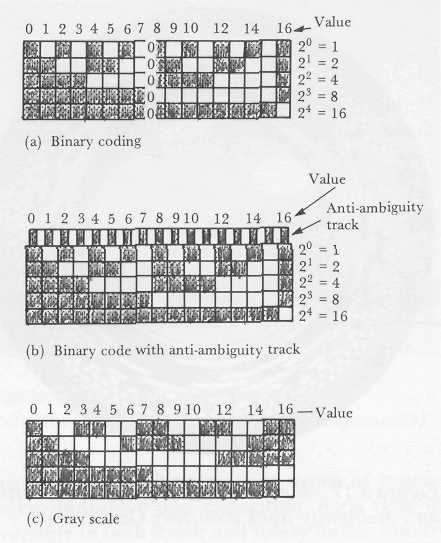
Рис. 3.3.9. Кодовые шкалы
|
|
|
Рис. 3.3.10. Общий вид и схема работы кругового датчика типа «вращающегося трансформатора», включенного в фазовом режиме
«Вращающийся трансформатор» состоит из статора и ротора. При подаче на обмотку ротора (или статора) переменного напряжения eo = Uo sin(ωt) на одной из обмоток статора (или ротора) индуцируется переменное напряжение e1= Uo sinφ сos(ωt), где φ— угловое положение ротора. На второй обмотке индуцируется e2= Uo сosφsin(ωt). После сложения этих двух сигналов на цепочке RC, параметры которой подбираются из условия ωRC = 1, получается выходной сигнал Uвых =Uosin (ωt + φ), который, как видно, равен по амплитуде входному сигналу, но сдвинут по фазе относительно него на угол φ, который представляет собой фактическое положение рабочего органа станка.
Для получения высокой точности позиционирования цену оборота фазы в таких датчиках часто выбирают в пределах 1 мм. При этих условиях вращающийся трансформатор может быть сцеплен с одним из промежуточных валов силового редуктора привода подачи или непосредственно с ротором двигателя подачи, как показано на рис.3.3.11а. Однако при такой схеме обратной связью не охвачены кинематические звенья силовой цепи. Погрешности зацепления шестерён, погрешности шариковой гайки и ходового винта, весь накопленный люфт в этих элементах перейдут в погрешность обработки детали. Добиться точности позиционирования при этих условиях выше 0,05—0,06 мм на всей длине перемещения рабочего органа станка практически невозможно.
Большей точности в цепи обратной связи можно добиться, используя для преобразования линейного перемещения в круговое вращение датчика рейку и шестерню, как показано на рис. 3.3.11б. Суммарный люфт в этой кинематической цепи будет значительно меньше, чем в первом случае, так как модуль шестерен меньше и они точнее изготовлены. Однако за счет накопленной ошибки в кинематических звеньях редуктора точность измерения выше, чем 0,02—0,03 мм получить невозможно.
Наиболее существенным недостатком такой схемы обратной связи являются вносимые ограничения по разгону и торможению рабочих органов станка. При больших ускорениях на последних звеньях ускоряющего редуктора возникают большие динамические усилия, которые часто приводят к поломке шестерен. Для устранения этого недостатка были разработаны датчики с электрической редукцией, у которых за один механический оборот ротора датчика суммарное смещение фазы будет равно R •360°, где R—величина редукции. Эти датчики называются редусинами.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.