Герконовые датчики положения состоят из набора магнитоуправляемых контактов, с функцией НО, НЗ или НО/НЗ. Один из видов, как правило - с плоским корпусом, служит для определения положения поршня пневмоцилиндра.
Ёмкостные датчики положения используют, как правило, для обнаружения объектов из диэлектрических материалов.
Ультразвуковые датчики положения могут определять любые объекты из любых материалов. К недостаткам можно отнести наличие мертвой зоны (5…10% от номинала) и относительно высокую стоимость.
Механические датчики положения - концевые выключатели, служат для контактной работы с объектом. Многообразие исполнительных головок (рычаги, плунжеры, пружины и.т.д.) и исполнений корпусов (до IP68) позволяет обеспечить надежное срабатывание датчика в сложных условиях эксплуатации.
3.3 Выбор и описание модулей МПС
3.3.1 ЖК
Индикатор лифтовой ИЛШ-221УКЛ
Основные технические характеристики:
Первичным источником электропитания является
Постоянное напряжение…………........…20В
Ток потребления, А, не более…………….0,2
Цвет индикатора........…...…............. зеленый
Тип индикатора………......…....7-сегментный
Материал панели……...........…поликарбонат
Краткое техническое описание:
Индикатор лифтовой (см. рисунок 3.10) предназначен для работы в составе системы управления лифтов в качестве периферийного устройства в составе лифтов с НКУ УЛ,УКЛ.
Управление изделия осуществляется с помощью клеммников , расположенных на плате с элементами. Назначение контактов приведены в таблице 1.
Таблица 3.1 – Назначение контактов

Конструктивно изделие выполнено в виде печатной платы с элементами на которой установлена панель из поликарбоната, в металлическом корпусе.
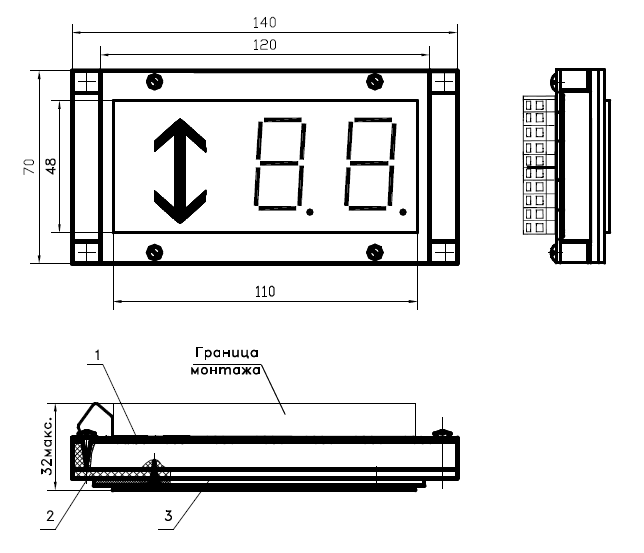
Рисунок 3.10 – Внешний вид индикатора
3.3.2 Выбор и описание блока питания
В данном разрабатываемом устройстве используется блок питания, который формирует следующие значения напряжений: +5В, +15В, 0В, -15В.
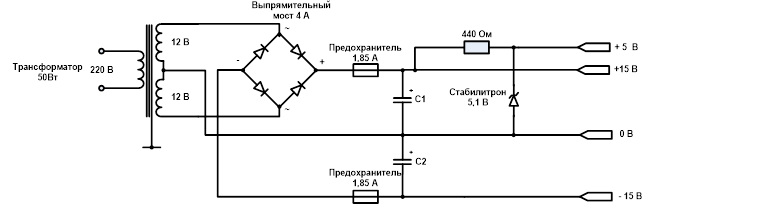
Рисунок 3.11 – Электрическая схема блока питания
3.4 Устройства проектируемой системы
Устройства необходимые для проектируемой системы представлены в таблице 3.2.
Таблица 3.2 – Устройства проектируемой системы
|
Наименование |
Модель |
Обозначение |
|
Микроконтроллер |
ADuC812 |
DD1 |
|
АЦП |
AD7581 |
DD2 |
|
ЖК-дисплей |
ИЛШ-221УКЛ |
DD3 |
|
Датчик веса |
ДВТ - 2СЛ |
ДВ |
|
Датчик препятствия |
Барьер-1М |
ДП |
|
Датчик этажа |
ДГНО-3 |
ДЭ |
|
Двигатель кабины |
SPDx-11 |
М1 |
|
Двигатель дверей |
SDPz-144 |
М2 |
3.5 Распределение разрядов портов микроконтроллера за внешними устройствами
Распределим разряды портов МК за внешними устройствами (Таблица 3.3).
Таблица 3.3 – Распределение разрядов портов МК за внешними устройствами
|
Наименование порта |
Устройство |
Назначение |
|
1 |
2 |
3 |
|
P0.0-P0.7, P1.0-P1.7 |
Кнопка на каждом этаже |
Клавиатура |
|
P2.0-P2.6 |
Выводы A, B, C, D, E, F, G |
ЖК-дисплей |
|
P2.7 |
Вывод DP |
ЖК-дисплей |
|
продолжение таблицы 3.3 |
||
|
1 |
2 |
3 |
|
P3.3 |
Вывод UP |
ЖК-дисплей |
|
P3.2 |
Вывод DOWN |
ЖК-дисплей |
|
P3.4 |
ДП |
Датчик препятствия |
|
P3.5 |
SV |
Лампочка |
|
P3.6 |
Вывод М1 |
Двигатель кабины |
|
P3.7 |
Вывод М2 |
Двигатель дверей |
3.6 Разработка функциональной схемы микропроцессорной системы
В соответствии с выбранными элементами разработаем принципиальную схему (приложение А).
3.7 Разработка принципиальной схемы микропроцессорной системы
В основу принципиальной схемы (приложение Б) положим функциональную.
Две клавиатуры подключаем к одному входу.
Датчик «Препятствие» представляет собой два фотоэлемента, которые отслеживают нахождение объекта в проеме дверей. Если между дверями находиться препятствие, то замыкается реле и на АЦП (DD4) подается напряжение, которое отправляет эту информацию на микропроцессор (DD1) для принятия мер.
Для определения положения кабины используются герконовые датчики. На каждом этаже установлено по одному. Когда лифт проходит мимо каждого, микроконтроллер узнает о номере датчика, соответствующего номеру этажа.
Подключение клавиатуры к МК представлено на рисунке 3.12
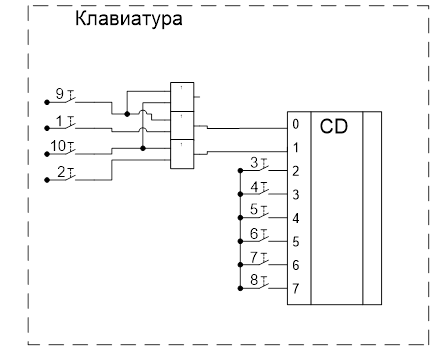
Рисунок 3.12 – Схема подключения клавиатуры
Подключение датчиков позиционирования кабины лифта представлено на рисунке 3.13
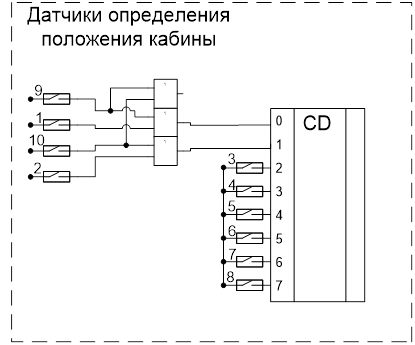
Рисунок 3.13 – Схема подключения датчиков позиционирования
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.