2. Специальная часть .
В данном разделе рассматривается исходный ЭП ,
определяются его достоинства и недостатки , а на основе
этого анализа решается вопрос о необходимости внедрения
нового ЭП . Далее рассматривается эффект от внедрения и
анализ результатов . В итоге необходимо синтезировать
систему автоматического регулирования ( или управления )
САР ( или САУ ) нового варианта ЭП , которая обеспечит
управление системой ЭП с требуемыми показателями качества . Анализ проводится на основе данных , полученных в предыдущем разделе ( далее следует пункт в котором приведены все необходимые данные для анализа и синтеза ) .
2.1. Анализ техническогозадания
на дипломное проектирование .
На основе описания рабочей машины и технологического процесса в целом ( рассмотренного в п.1. ) было установлено , что :
¨ требуемый диапазон регулирования скорости ЭД состовляет 10 ;
¨ устойчивая работа при колебаниях величины напряжения питающей сети в
пределах ![]() 15 В ,
15 В ,
т.е. изменение производительности не более 3 % от заданного значения ;
¨ Пусковой ток может превышать номинальный не более чем в два раза ;
¨ условия эксплуатации ЭП характеризуются следующими требованиями при закрытом помещении с умеренным и холодным климатом ГОСТ 15150-69 :
ü температура окрежающей среды от +1оС до +30оС ;
ü высота над уровнем моря до 1000 м ;
ü место размещения и допустимые вибрации соответствуют группе условий эксплуатации М2 по ГОСТ 17516.1-90 ;
ü окружающая среда невзрывоопасная , не содержащая агрессивных газов и паров в концентрациях , разрушающих металлы и изоляцию , не насыщенная токопроводящей пылью и водяными парами , содержание токопроводящей пыли в помещении и в охлаждающем воздухе не более 0,7 мг/м3 .
2.2.Исходный электропривод дымососа .
В данной работе рассматривается дымосос третьего варианта ( согласно табл. 2.1 ) с электродвигателем 4А 355 S6 У3 , который имеет следующие параметры :
- Номинальная мощность : Рн = 160 кВт ;
- Номинальное напряжение : Uн = 380 / 660 В ;
- Синхронная частота вращения : n = 1000 об / мин ;
- КПД в номинальном режиме работы : h = 0.935 ;
- Номинальный сosj = 0.9 ;
- Показатели механической характеристики ( рис. 2.2.1.):
n Мп / Мн = 1.4 ;
n Мк / Мн = 2.4 ;
n Мmin / Мн = 0.9 ;
n Номинальное скольжение : Sн = 1.4 % ;
n Критическое скольжение : Sк = 6.5 % ;
n Iп / Iн = 7 ;
- Степень защищённости IР 44 ;
- Охлаждение IСА 0141 ;
- Число пар полюсов : 2р = 6 ;
- Номинальный режим работы S1 ;
- Параметры упрощённой схемы замещения ( рис. 2.1.1.) в номинальном режиме , в относительных единицах :
Ø Хm = 3.8 ;
Ø R1’ = 0.02 ;
Ø X1’ = 0.1 ;
Ø R2’’ = 0.015 ;
Ø X2’’ = 0.14 ;
-
Момент инерции ротора : Jд = 7.3 кг*м![]() .
.
Рис. 2.2.1. Механическая характеристика асинхронных
электродвигателей серии 4А :
- Мн - номинальный момент ЭД ;
- Мmax - максимальный ( или критический )
момент ЭД ;
- Мп - пусковой момент ЭД .
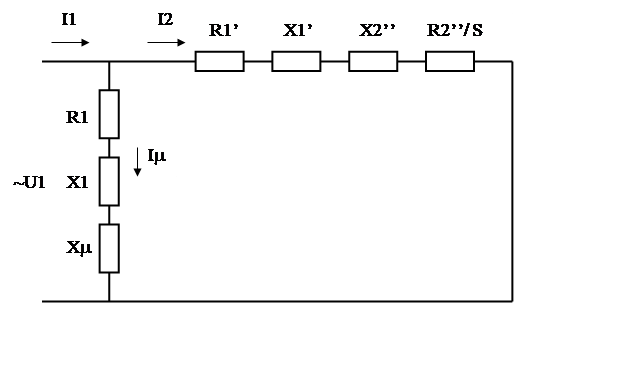 |
Рис. 2.2.2. Упрощённая Г-образная схема замещения АД ,
где R1 , Х1 находятся по формулам ( 2.2.1 ) и
( 2.2.2 ) .
Х1 » 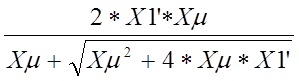 ( 2.2.1 )
( 2.2.1 )
R1 »R1*X1 / X1’ ( 2.2.2 )
В исходном варианте АЭП асинхронный электродви -гатель ( далее АД ) подключён к питающей его электросети
цеха через автоматический выключатель QF 1 ( рис. 3.1 ) с тепловым и электромагнитным расцепителем , защищающим его от токов короткого замыкания и длительных токов нагрузки , превышающих номинальный ( токи перегрузки ) , вызывающих недопустимый перегрев двигателя и , как следстсвие , уменьшение срока его эксплуатации . Данная
система ЭП получила название – прямой пуск ( т. е. отсутствие регулирования какого-либо параметра АД ) . Он является самым дешёвым , но
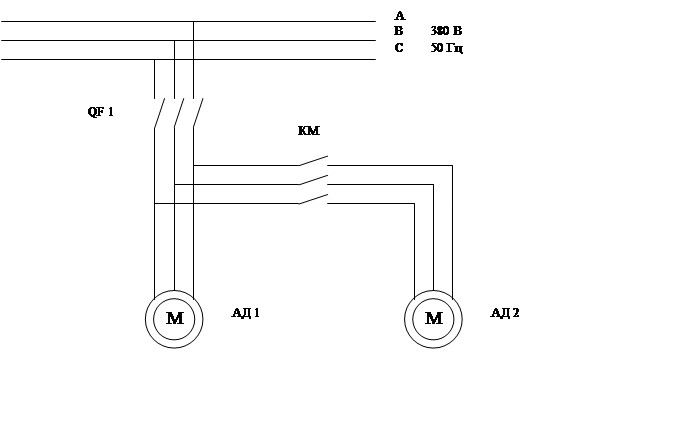 |
Рис 2.1.3. Электрическая силовая схема исходного ЭП:
АД1 – рабочий ЭД ;
АД2 – запасной ЭД .
и самым не экономичным и неэффективным при данном рабочем механизме , т. к. регулирование производительности дымососа производится шибераными механизмами . Шиберный механизм работает следующим образом : при поступлении сигнала с регулятора на уменьшение производительности дымососа , регулятор подаёт на электродвигатель шибера сигнал на единичное перемещение шибера ; ЭД производит перемещение шибера ( а т. к. шибер представляет собой железный щит , создающий сопротивление передвижению воздушных масс ) и , создав дополнительное воздушное сопротивление , он тем самым уменьшает производительность дымососа. У данного способа регулирования производительности дымососа существует множество недостатков :
- постоянное потребление полной мощности приводным
электродвигателем ( далее ЭД ) ;
- необходимость наличия самого шиберного механизма ;
- данный способ регулирования производительности ды
мососа существенно снижает КПД всей установки .
2.3. Проверка исходного ЭД
по мощности .
Произведём проверку выбора мощности ЭД по формуле ( 1.3.6. ) :
Рэд = 1.2*Н*Q / ( 3600*h ) = 1.2*3.38*100000 /
( 3600*0.8 ) = 140.83 кВт
Сравнивая полученную величину мощности ЭД с величиной номинальной мощности комплектного АД убеждаемсяв том , что ЭД выбран верно .
2.4. Выбор системы ЭП
Таким образом , на основе анализа , проведённого в п.2.2. , установлено , что применение регулируемого ЭП на данном рабочем механизме имеет особое значение . Кроме повышения КПД , применение регулируемого ЭП для мощных
дымососов позволяет в ряде случаев упростить конструкцию
турбомашин , исключив направляющий аппарат или шиберный
механизм , а также обеспечить параллельную работу двух или
более дымососов .
ЭП на основе АД удобно делить на три группы : в первой энергия скольжения рассеивается в виде тепла в двигателе и дополнительных резисторах , во второй энергия скольжения направляется в сеть или на главный ведущий вал посредством преобразующих машин , к последней группе относится регулирование на основе изменения частоты питающего напряжения ( или тока ) при помощи автономного инвертора напряжения ( или тока ) и непосредственного преобразователя частоты ( далее НПЧ ) . К первой из перечисленных выше групп могут быть отнесены в основном методы параметрического регулирования скорости АД , ко второй – каскадные схемы включения . ЭП постоянного тока , широко распространившиеся пару десятков лет назад , из-за ненадёжности электродвигателей постоянного тока и гораздо больших эксплуатационных затрат ( по сравнению с АД ) , а так же в виду наличия исходного АД , в данном анализе не рассматриваются .
При оценке технико-экономических показателей ЭП в первую очередь необходимо оценить потери мощности , которые возникают при регулировании производительности механизма . Для первой группы ЭП на основе анализа [ 8 , с.383 ]
можно получить , что максимум потерь энергии при регулировании составляет примерно 15 - 17 % номинальной мощности
на валу . Т.е. по сути являются самыми низкоэффективными методами регулирования
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.