Гидроаппаратура с пропорциональным управлением
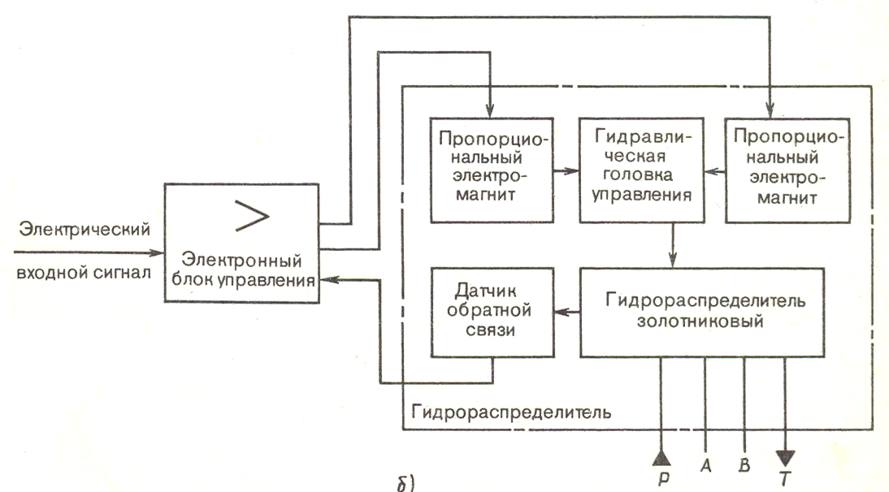
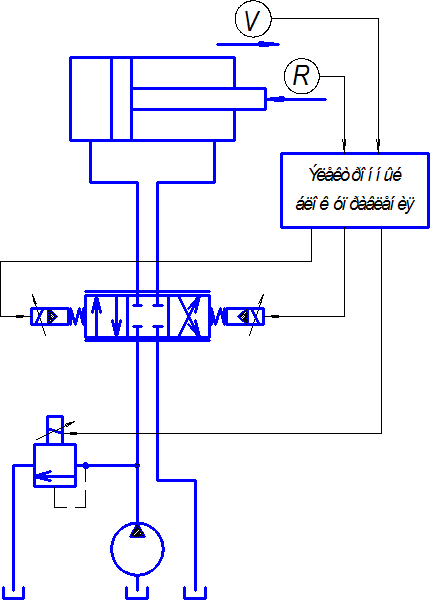
Структурная схема управления пропорциональных гидрораспределителей РП10 и РП16
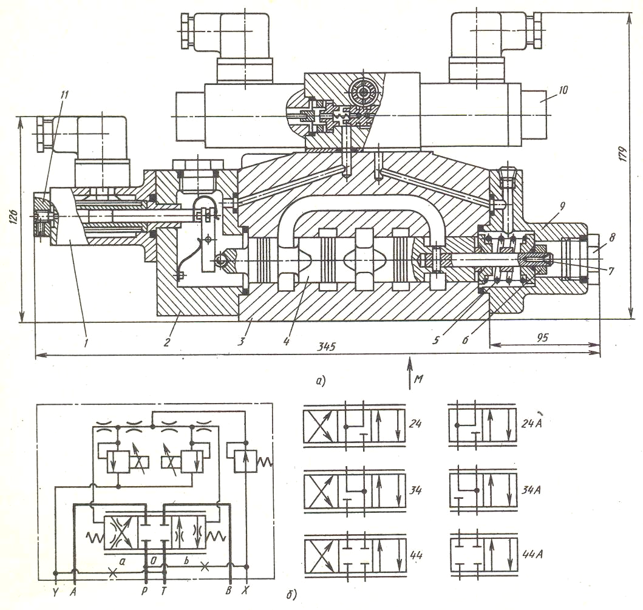
Пропорциональный двухступенчатой гидрораспределитель РП16
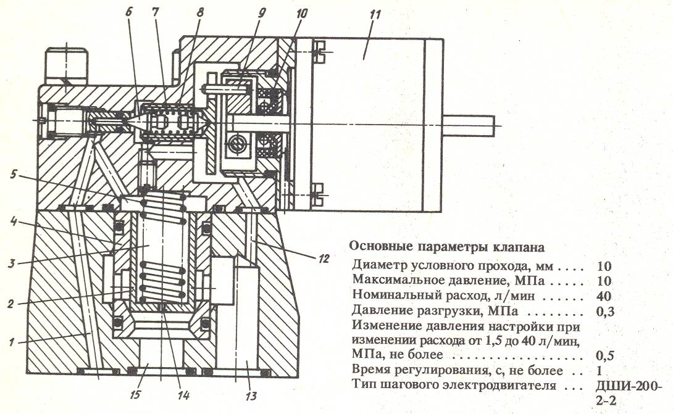
Клапан предохранительный с пропорциональным управлением типа М-ПКПД

1 – пропорциональный электромагнит; 2 – элемент сопло-заслонка 3 – управляющая ступень; 5 – основная ступень. В зависимости от тока в обмотке управления пропорционального магнита изменяется давление в полости 4, а следовательно, и в напорной линии Р гидросистемы.
Встраиваемый дроссель с пропорциональным управлением типа ДВП
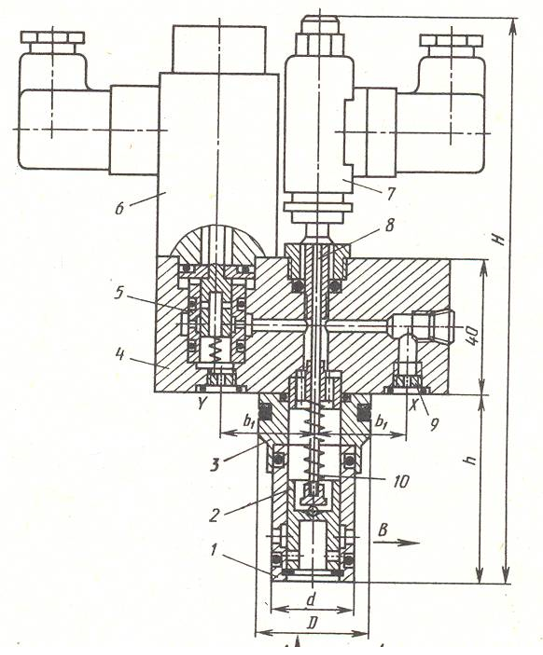
Основная ступень: 1 – гильза; 2 – клапан; 3 – втулка; 4 – корпус; 10 – пружина. Управляющая ступень 5: 6 – пропорциональный электромагнит; 7 – датчик обратной связи соединен с клапаном 2 тягой 8; Фактическое положение клапана постоянно контролируется датчиком 7. При наличии рассогласования между заданным и фактическим положениями усилитель изменяет ток в обмотке магнита 6 в направлении ошибки.
Применение аппаратуры с пропорциональным управлением
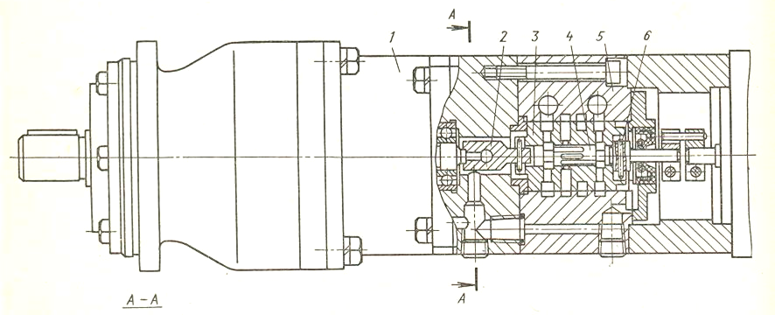
Электрогидравлические шаговые приводы Ротационный электрогидравлический шаговый привод ЭМГ18-1 (гидравлический усилитель крутящего момента с шаговым двигателем)

1 - аксиально-поршневой гидромотор, 2 – муфта, 3 – втулка, 4 – крановый золотник, 5 – корпус следящего устройства, 6 – штифт, ограничивающий максимальную величину угла отставания. Просты по конструкции. Ограничена частота вращения (200 об/мин) – малая пропускная способность кранового золотника (увеличение размеров невозможно из-за гидродинамических сил).
ЭГШП типа Э32Г18-2
1 – шаговый двигатель; 2 – поводковая муфта; 3 – гайка; 4 – прецизионный винт; 5 – четырехкромочный распределитель; 7 – гидромотор Г15-2.
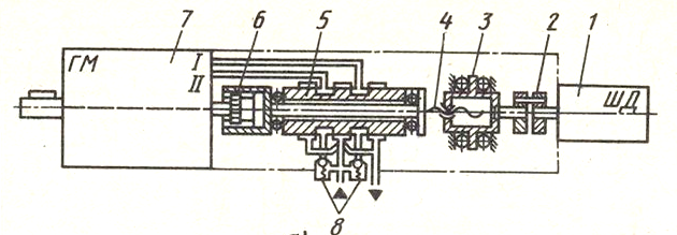
Четыре типоразмера: рабочий объем – 20, 40, 80, 160 см3; максимальная частота вращения – 2000, 1000 об/мин; угловая дискрета – 1,5°.
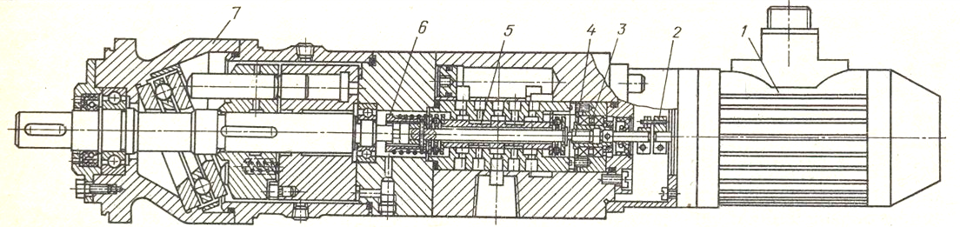
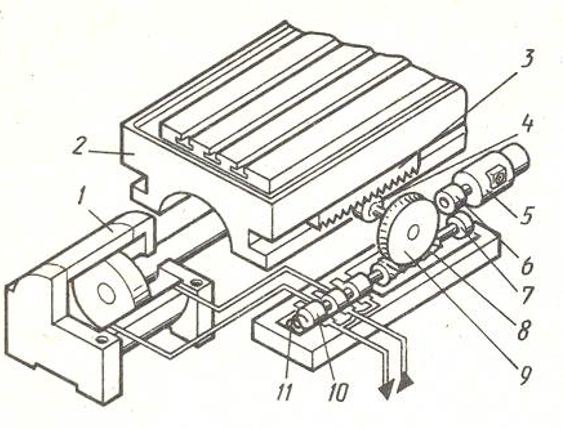
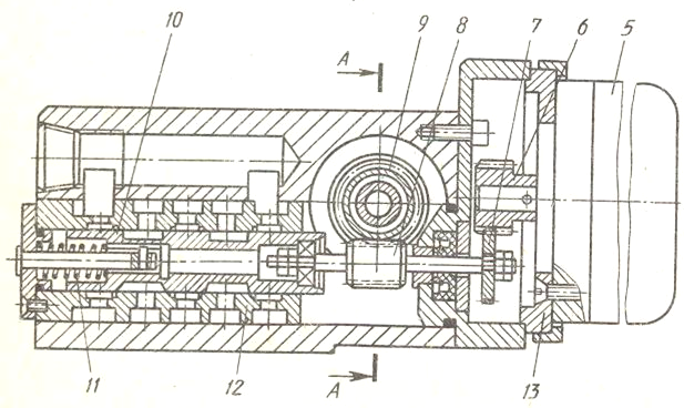
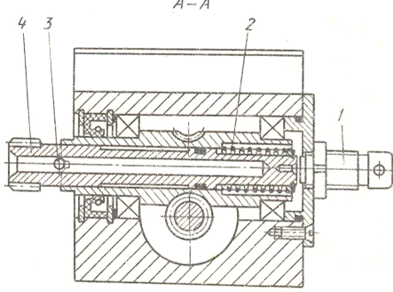
Линейный ЭГШП типа Г28-2

Управляющая часть 1 (ШД, следящий золотник) – унифицирована с управляющей частью Э32Г18-2; Силовой цилиндр 9 - поршень 7, полый шток 10, гайка 6; Обратная связь – валик 2, зубчатые колеса 3, 4, 5, винт с большим шагом (несамотормозящей резьбой)
Линейный ЭГШП с автономным задатчиком типа Г69-14
1 – гидроцилиндр; 2 – стол станка; 3 – рейка; 4 – зубчатое колесо; 5 – ШД; 6, 7 – зубчатая пара; 8, 9 – червячная пара; 10, 12 – золотниковая пара; 11 – пружина для выбора зазора в червячной передачи. ЛЭГШП с автономным задатчиком за счет охвата конечного звена отрицательной обратной связью по положению позволяет повысить точность позиционирования и жесткость, обеспечить широкие компоновочные возможности использования в различных механизмах.
Автономный задатчик типа Г69-14
1 – бесконтактный выключатель; 2 – пружина; 3 – предохранительный механизм; 4 - зубчатое колесо обратной связи; 6, 7 – зубчатая пара; 8, 9 – червячная пара; 10 – золотник; 12 – гильза.
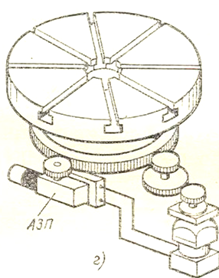
Типовые схемы применения линейных ЭГШП с автономным задатчиком

а) – в многозвенных шарнирных механизмах роботов зубчатое колесо обратной связи задатчика взаимодействует с колесом, жестко связанным со звеном, перемещение которого осуществляется шарнирно закрепленным цилиндром 1 или поворотным гидродвигателем 2. б) – в механизмах увеличения длины хода. в) – в ротационном гидроприводе для реализации обратной связи по углу поворота винта. г) – в механизмах поворота делительных столов гидромоторами. д) – задатчик можно связывать со штоком цилиндра с помощью фрикционного ролика (когда не требуется высокой точности отработки дискреты).

Широкодиапазонные цифровые электрогидравлические приводы
1-рабочий орган 2-рейка 3-датчик обратной связи 4-микропроцессорное УЧПУ 5-блок управления шаговым двигателем 6-шаговый двигатель 7-винтовая пара 8-регулируемый насос 9-насосная установка 10-дросселирующий распределитель 11-золотник 12-гидроцилиндр
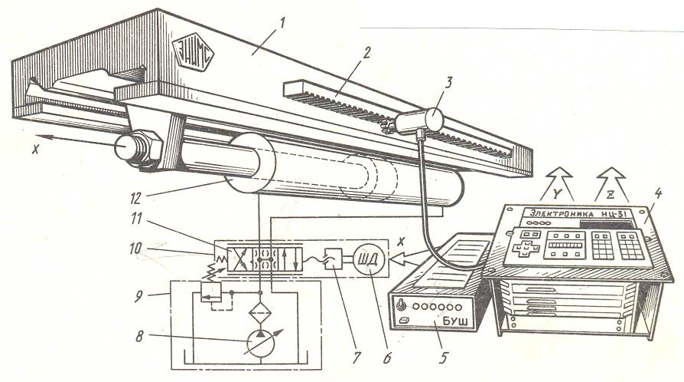
ШЭГП позволяют: исключить присущую ЭГШП зависимость максимальной скорости от дискретности перемещения; повысить точность и жесткость за счет введения обратной связи по перемещению конечного звена; обеспечить длительное сохранение точности; улучшить компоновочные возможности привода (управляющие устройства не связаны механически с гидродвигателем и могут быть расположены в удобном месте); повысить надежность благодаря применению цилиндров, исключению шариковинтовых передач и использованию цифрового управления; снизить требования к ШД по максимальной частоте вращения; упростить кинематические цепи.
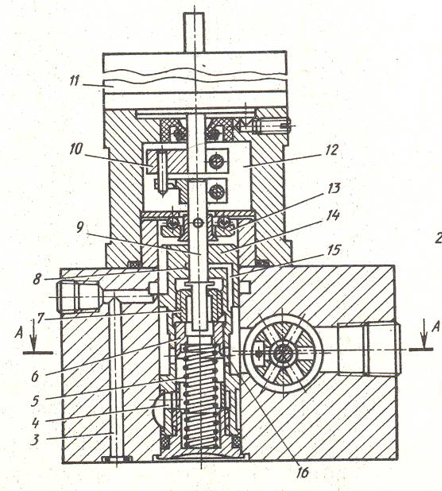
Аппаратура с цифровым управлением Предохранительный клапан МКПВЦ-10/3С21
Регулятор расхода МЦПГ55-22М

Диаметр условного прохода, мм…......…10 Расход масла, л/мин…............ …..0,04…25 Номинальное давление, МПа… ……... 6,3 Точность поддержания установленного расхода, %...±5 Время полного изменения расхода, с, не более……………………………………....1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.