![]() ПРИМЕР
ВЫПОЛНЕНИЯ РАБОТЫ
ПРИМЕР
ВЫПОЛНЕНИЯ РАБОТЫ
Исходные данные:
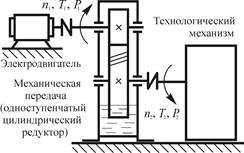
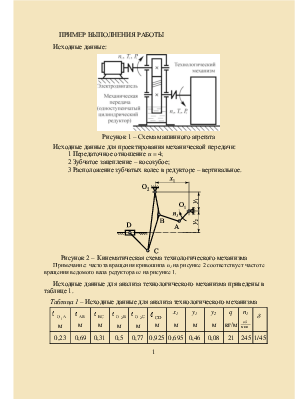
Рисунок 1 – Схема машинного агрегата
Исходные данные для проектирования механической передачи:
1 Передаточное отношение и = 4;
2 Зубчатое зацепление – косозубое;
3 Расположение зубчатых колес в редукторе – вертикальное.
Рисунок 2 – Кинематическая схема технологического механизма
Примечание: частота вращения кривошипа n1 на рисунке 2 соответствует частоте вращения ведомого вала редуктора n2на рисунке 1.
Исходные данные для анализа технологического механизма приведены в таблице 1.
Таблица 1 – Исходные данные для анализа технологического механизма
|
м |
м |
м |
|
|
м |
x1 м |
y1 м |
y2 м |
q кг/м |
n1
|
|
|
0,23 |
0,69 |
0,31 |
0,5 |
0,77 |
0,925 |
0,695 |
0,46 |
0,08 |
21 |
245 |
1/45 |
![]()
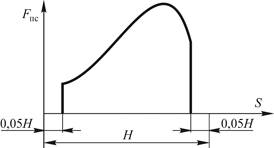
Рисунок 3 – Диаграмма силы полезного сопротивления
Выполненная работа должна иметь следующие разделы:
1 Структурный анализ технологического механизма.
2 Кинематический анализ механизма.
2.1 Построение плана положений.
2.2 Построение планов скоростей и ускорений для исследуемых положений механизма.
3 Динамический анализ механизма.
3.1 Расчет приложенных к звеньям механизма активных сил и инерционных нагрузок.
3.2 Определение величины уравновешивающей силы методом Н. Е. Жуковского.
3.3 Определение момента инерции махового колеса и потребной мощности двигателя.
4 Определение основных параметров зубчатой механической передачи и выбор электродвигателя.
5 Выбор материалов для изготовления деталей передачи и определение допускаемых напряжений.
6 Определение основных геометрических параметров зубчатой передачи.
6.1 Расчет величины межосевого расстояния.
6.2 Определение геометрических параметров зубчатых колес.
7. Проверочный расчет зубчатой передачи на прочность по контактным напряжениям.
8. Расчет и проектирование валов и корпуса редуктора. Выбор подшипников.
9. Выбор посадок и расчет допусков гладких цилиндрических соединений.
Приложение А Графическая часть анализа технологического механизма на листе формата А1.
Приложение В Эскизная компоновка редуктора на листе формата А2.
1 Структурный анализ технологического механизма
Механизм состоит из пяти подвижных звеньев и одного неподвижного звена (стойки), соединенных между собой шестью вращательными (О1, О2, А, В, С, D) и одной поступательной (Е) кинематическими парами.
Степень подвижности механизма определяется по формуле Чебышева
W = 3n – 2 pн – pв , (1)
Где n – число подвижных звеньев механизма, n = 5;
pн – число низших кинематических пар, pн = 7 (О1, О2, А, В, С, D, Е);
pв – число высших кинематических пар, pв = 0.
![]() .
.
Механизм имеет одну степень подвижности, что соответствует одному ведущему звену. Ведущим звеном механизма является стержень О1А. Кроме того, механизм имеет в своем составе два шатуна – звенья 2 и 4, представляющие собой тонкие однородные стержни АВ и CD. Коромысло (звено 3) представляет собой треугольник O2BC, образованный посредством неподвижного соединения стержней O2B, O2C и BC. Звено 5 является ведомым звеном механизма и представляет собой ползун, или, в данном случае, резцовую призму.
Образован механизм последовательным присоединением к группе Ассура I класса 1 вида (ведущему звену со стойкой) группы Ассура II класса 1 вида(звенья 2 и 3, кинематические пары А, В, О2), а затем группы Ассура II класса 2 вида (звенья 4 и 5, кинематические пары С, D, Е). Составляющие механизм группы Ассура представлены в графической части курсовой работы.
Формула строения механизма: ГА I (1) + ГА II (1) + ГА II (2).
Наивысший класс присоединенных групп – второй, поэтому механизм по классификации академика Артоболевского следует отнести к механизмам II класса.
2 Кинематический анализ механизма
2.1 Построение плана положений механизма и круговой циклограммы движения ползуна
Построение начинаем с вычерчивания 12
положений ведущего звена. Принимаем масштаб плана положений ![]() . Масштаб
. Масштаб ![]() принят таким, чтобы план
положений занял все отведенное для него место на чертеже. В соответствии с
выбранным масштабом определяем длины звеньев механизма на чертеже, а также
координаты шарниров и положение направляющей.
принят таким, чтобы план
положений занял все отведенное для него место на чертеже. В соответствии с
выбранным масштабом определяем длины звеньев механизма на чертеже, а также
координаты шарниров и положение направляющей.
![]()
Дальнейший расчет сводим в таблицу.
Таблица 2 – Расчет длин звеньев и координат неподвижных шарниров
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.