«Программа «Конфигуратор Вариконт-МИКРО ПУ». Справочное руководство по настройке контроллера Вариконт-МИКРО ПУ». ГИЮЛ.26487-05 90 01.
«Программа «Конфигуратор Вариконт-МИКРО КП». Справочное руководство по настройке контроллера Вариконт-МИКРО КП». ГИЮЛ.26487-06 90 01
1.1.4.6. Контроллер начинает работать сразу после включения питания.
После включения питания контроллера начинается цикл инициализации. После завершения цикла инициализации программа переходит к основному циклу работы.
Основным принципом работы контроллера является работа по событиям.
Событием в контроллере является:
- изменение состояния устройств контроллера (ОЗУ, ПЗУ, блоков);
- изменение состояния каналов связи;
- прием/передача сообщений из каналов связи;
- изменения состояния сигналов на входах блоков;
- прием программных запросов от управляющей ПЭВМ.
1.1.4.7. Контроллер ВАРИКОНТ-МИКРО как система верхнего уровня.
1.1.4.7.1. Программное обеспечение контроллера для режима ПУ (ЦППС) решает задачи сбора данных, вывода информации в ПЭВМ, на диспетчерский щит и на другой уровень многоуровневой системы, передает и выполняет команды управления, настройки и диагностики.
Программа работы контроллера для режима ПУ (ЦППС) (совместно с программой конфигурирования) обеспечивает гибкость настройки под особенности конкретной системы:
- настройка программы опроса контроллеров нижнего уровня позволяет обеспечить достаточно частый опрос выбранных КП, установить порядок опроса, определить соотношения между количеством опроса требований (ОТ) и запросов телеизмерений (ЗТИ) в одном цикле опроса;
- программа опроса предусматривает возможность выбора типа опроса индивидуально для каждой группы ТИ: выбор периода между опросами (в секундах) для групп с высоким и низким приоритетом или опрос группы в общем цикле. При опросе в общем цикле все группы ТИ всех КП на одном направлении включаются в общий список, что улучшает равномерность опроса;
- при работе по модемному каналу возможна индивидуальная настройка частот, скоростей обмена и вида модуляции для каждого КП на одном направлении (например, 100 Бод ЧМ для КП ТМ-120 и 2400 Бод ФМ для КП ВАРИКОНТ), что позволяет на 100% использовать пропускную способность канала;
- при передаче информации на вышестоящий уровень многоуровневой системы используется переадресация телеизмерений из разных исходных групп, что увеличивает емкость и пропускную способность канала.
1.1.4.7.2. В контроллере ПУ предусмотрены буферы, предназначенные для работы с каналами связи. На каждое направление отведено по одному входному буферу, объемом на 50 информационных посылок.
В модемном блоке МВС4 контроллера предусмотрен буфер ретроспективных посылок, объемом около 100 служебных и информационных посылок, предназначенный при диагностировании для анализа качества канала связи как для ВАРИКОНТА ПУ, так и для ВАРИКОНТА КП.
1.1.4.7.3. Питание и связь модулей с процессорным модулем CPU686E осуществляется по шине ISA кроссплаты контроллера. Обмен информацией между процессорами осуществляется по сетевой шине Ethernet.
1.1.4.7.4. . Пример конфигурации контроллера ВАРИКОНТ-МИКРО как системы верхнего уровня приведен на рисунке 2.
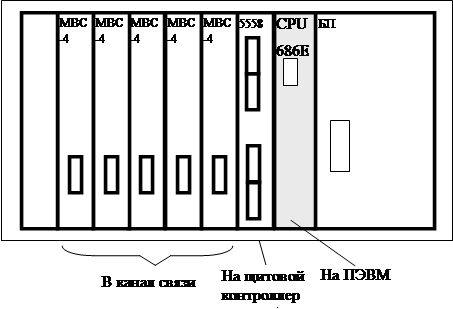 |
CPU686E - процессорный модуль
МВС-4 - модемный модуль связи с каналами связи
5558 – модуль связи по интерфейсам RS-485 и RS-232
Рис.2
Обмен информацией с контроллерами нижнего уровня (КП, станция КП) осуществляется через модемные модули МВС-4 и модули 5554 (5558).
Информация от контроллера по сети Ethernet передается на ПЭВМ с установленной на ней SCADA-системой сбора, обработки, отображения и управления.
Информация на диспетчерский щит выводится через модуль связи 5558 (5554).
Для отображения информации на мнемоническом диспетчерском щите с контроллера ВАРИКОНТ-МИКРО ПУ на щитовые модули (МИ-40-00, МИ-40-01) выводятся два типа информации: телесигнализация и телеизмерения.
Телесигналы выводятся в виде двухпозиционных сигналов (модуль МИ-40-00).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.