СОДЕРЖАНИЕ
Стр.
ВВЕДЕНИЕ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6 1.ТЕХНИЧЕСКОЕ ЗАДАНИЕ И ТЕХНИЧЕСКОЕ ПРЕДЛОЖЕНИЕ . . . . 8
1.1 Техническое задание . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8 1.2 Требуемые технические характеристики . . . . . . . . . . . . . . . . . . . . . . . . . 8 1.3 Техническое предложение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2. КОНСТРУКТОРСКИЙ РАЗДЕЛ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1 Состав конструкции . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13
2.2 Описание сборочных единиц . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3 Принцип работы конструкции . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4 Расчеты, подтверждающие размеры конструкции. . . . . . . . . . . . . . . . . .16
2.4.1Выбор редуктора, гидромотора . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16
2.4.2 Расчет вала на прочность. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
2.4.3 Расчет на прочность шлицевого соединения . . . . . . . . . . . . . . . . . . . . 21
3. РАЗДЕЛ МОДЕЛИРОВАНИЯ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 3.1 Функциональная схема регулируемого гидропривода .. . . . . . . . . . . . . 23
3.2 Структурная схема регулируемого гидропривода. . . . . . . . . . . . . . . . . 24
3.3 Структурное моделирование замкнутой системы гидропривода. . . . . .26
4. РАЗДЕЛ АВТОМАТИЗАЦИИ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.1 Конструкция и выбор ДОС . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.2 Формирование структурной схемы управления привода . . . . . . . . . . . .29
4.3 Расчет усилителя мощности . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
5. ОХРАНА ТРУДА . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34 5.1 Производственное освещение помещений. . . . . . . . . . . . . . . . . . . . . . . 34
5.2 Метеорологические условия производственной среды . . . . . . . . . . . . . 37
5.3 Рабочее место технолога программиста . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.4 Защита от источников излучений. . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . 43
5.5 Меры по электробезопасности . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.4.2 Пожаробезопасность . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45
6. ЭКОНОМИЧЕСКИЙ РАЗДЕЛ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47
6.1Описание задачи и пути её решения . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . 48
6.2 Формулировка задачи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 6.2.1 Требуемые технические параметры. . . . . . . . . . . . . . . . . . . . . . . . . . . ..49
6.3 Оценка затрат, связанных с реализацией предлагаемого технического решения. . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . .. . . . . . . . . . . . . . .. . . . . . . .50
6.3.1 Затраты на приобретение отдельных узлов, полуфабрикатов, материалов, необходимых для изготовления опытного образца . . . . ..50
6.3.3 Социальный налог. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
6.3.6 Общая сумма затрат на изготовление лабораторной установки. . . . . .55
ЗАКЛЮЧЕНИЕ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ . . . . . . . . . . . . . . . . . 58 ПРИЛОЖЕНИЕ 1
ПРИЛОЖЕНИЕ 2
ВВЕДЕНИЕ.
Возникновение и развитее автоматики неразрывно связанны с общим прогрессом в науке и технике. Роль автоматике непрерывно растет в машиностроении, что объясняется рядом причин, из которых можно выделить следующие:
1. С развитием и совершенствованием методов управления различными процессами требуются скорости и усилия, значительно превышающие физические возможности человека.
2. При автоматическом управлении процессами значительно повышаются технико-экономические показатели производства из-за сокращения эксплутационных расходов и повышения надежности протекания процессов по требуемым программам.
3. Появление и развитие отраслей, в которых управление процессами становится недоступным для человека или вредным для его организма (химическое производство, ядерная энергетика и т.п.)
Внедрение автоматического управления связано с проведением широкого комплекса технических, организационных, экономических, культурно-просветительных и других мероприятий, объединяемых понятием автоматизация. Автоматизация ведет к коренному изменению характера труда, к сглаживанию граней между трудом физическим и умственным, к облегчению умственного труда благодаря применению вычислительных машин.
В машиностроении процесс автоматизации развивается ускоренными темпами и охватывает целые производственные комплексы, участки, цехи и заводы.
При автоматизации производства следует исходить не только из возможностей существующей технологии, но и из возможностей применения новых высокоэффективных технологических процессов, в основе которых лежат последние достижения современной науки и техники. Прогрессивная технология обеспечивает возможность значительного повышения производительности труда, использования автоматизированных и автоматических систем машин не только в этой отрасли, где эта технология используется, но и в смежных отраслях. Автоматизация производства является также важнейшим составным элементом внедрения новой техники.
Основания нефтяных платформ, в зимнее время года, подвергаются воздействию льда. В результате трения льда происходит износ бетона. Знание природы износа, позволит делать меньшие припуски при строительстве платформ, по итогам испытаний, выбирать подходящие марки цемента.
В настоящее время в строительном институте ДВГТУ нет лабораторной установки и методики испытаний воздействия льда на бетон.
В данном дипломном проекте проектируется лабораторная установка, моделирующая природные условия морской среды, конкретно установка реализует давление и скорость движения льда, температуру окружающей среды. (Р= от 0 до 5МПа; Ụ= от 0 до 1м/с; T= -60оС.)
Воспроизвести скорость и давление позволит установка, имеющая два привода подач. Оператор, управляя приводами, задаёт конкретные условия.
1.ТЕХНИЧЕСКОЕ ЗАДАНИЕ И ТЕХНИЧЕСКОЕ ПРЕДЛОЖЕНИЕ
1.1 Техническое задание
“Гидравлическая лабораторная установка для исследования бетона трением льда”.
Цель: разработать гидравлическую лабораторную установку, моделирующая природные условия морской среды.
1.2 Технические характеристики
1. Номинальное давление насосной станции, МПа. . . . . . . . . . . . . . . 7
2. Габариты конструкции, мм:
Высота . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1500
Длина . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2000
Ширина . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2000
3. Габариты образца бетона, мм:
Высота . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100
Длина . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .200
Ширина . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
4. Масса конструкции, кг, не более . . . . . . . . . . . . . . . . . . . . . . . . . 500
5. Давление льда на бетон, МПа . . . . . . . . . . . . . . . . . . . . . . . . . . . .0 - 5
6. Скорость движения бетона, м/с . . .. . . . . . . . . . . . . . . . . . . . . . . . 0 - 1
7. Температура в лабораторной установке. 0С . . . . . . . . . . . .-400 - -600
8. Продолжительность предварительного прогона, мин . . . . .. . .1.5 - 2
9. Время на подготовку испытания, мин . . . . . . . . . . . . . .. . . . 170 - 180
10. Продолжительность испытания, мин . . . . . . . . . . . . . . . . . .100 - 120
11. Период проведения измерений, мин . . . . . . . . . . . . . . . . . . . . . . . . .20
12. Стоимость лабораторной установки, ру, не более. . . . . . . . . .200000
13. Мощность главного привода, кВт . . . . . . . . . . . . . . . . . . . . . . . .5 - 7
14. Привод вращения и давления - гидравлические
15. Диаметр поршня цилиндра, мм . . . . . . . . . . . . . . . . . . . . . . . . . . . . .80
16. Диаметр штока цилиндра, мм . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . 50
17. Максимальный ход штока цилиндра, мм . . . . . . . . . . . . . . . . . . . . .30
18. Источник питания для гидроприводов – насосная станция.
1.3 Техническое предложение.
Целью дипломного проекта является разработка конструкции автоматизированной лабораторной установки для исследования бетона трением льда.
Прототипом, для создания установки, послужила модель изображенная на рис.1.
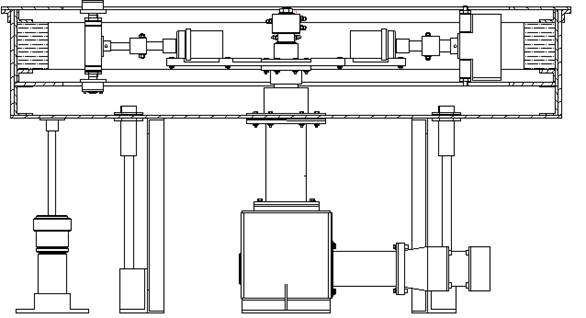
Рис.1 Прототип лабораторной установки.
Испытуемый образец закрепляется в оправке. Оправка закреплена на штоке гидроцилиндра. Гидроцилиндр, закрепленный на диске, задает нагрузку на образец. На диске закреплены еще два гидроцилиндра, которые требуются для уменьшения изгибающего момента, действующего на ось. Цилиндры расположены относительно друг друга под углом 1200. На штоках компенсационных гидроцилиндров закреплены ролики
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




