Вычисления координат замкнутого хода
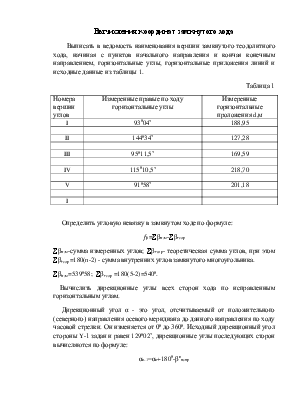
Выписать в ведомость наименования вершин замкнутого теодолитного хода, начиная с пунктов начального направления и кончая конечным направлением, горизонтальные углы, горизонтальные приложения линий и исходные данные из таблицы 1.
Таблица 1
|
Номера вершин углов |
Измеренные правые по ходу горизонтальные углы |
Измеренные горизонтальные проложения d,м |
|
I |
93004’ |
188,95 |
|
II |
144034’ |
127,28 |
|
III |
95011,5’ |
169,59 |
|
IV |
115010,5’ |
218,70 |
|
V |
91058’ |
201,18 |
|
I |
Определить угловую невязку в замкнутом ходе по формуле:
ƒβ=åβизм-åβтеор
åβизм-сумма измеренных углов; åβтеор- теоретическая сумма углов, при этом åβтеор=180(n-2) - сумма внутренних углов замкнутого многоугольника.
åβизм=539058; åβтеор =180(5-2)=5400.
Вычислить дирекционные углы всех сторон хода по исправленным горизонтальным углам.
Дирекционный угол α - это угол, отсчитываемый от положительного (северного) направления осевого меридиана до данного направления по ходу часовой стрелки. Он изменяется от 00 до 3600. Исходный дирекционный угол стороны Y-1 задан и равен 129002’, дирекционные углы последующих сторон вычисляются по формуле:
αn-1=αn+1800-βnиспр
где αn+1 - дирекционный угол последующей стороны; αn- дирекционный угол предыдущей стороны; βnизм- правый по ходу исправленный угол между этими сторонами.
Вычисление дирекционных углов сторон:
αv-1=129002
+
1800
309002
β1= 93004
α 1-2 =215058
+
1800
395058
β2= 144035
α2-3=251023
+
1800
431023
β3=95012
α3-4=336011
+
1800
516011
β4= 115011
α4-5=410
+
1800
2210
β5=91058
αv-1=129002
Вычислить приращения координат ∆Xi=dicosαi и ∆Si=disinαi по дирекционным углам и горизонтальным проложением сторон теодолитного хода, где di-горизонтальное проложения стороны хода; αi- дирекционный угол, соответствующие данному направлению.
∆X1=188,95 cos2150+ 58/60 = -152,93; ∆Y1=188,95 sin2150+ 58/60= - 110,97;
∆X2=127,28 cos2510+23/60= - 40,63; ∆Y2=127,28 sin2510+23/60=120,62;
∆X3=169,59 cos3360+11/60=155,15; ∆Y3=169,59 sin3360+11/60= - 68,48;
∆X4=218,7 cos410=165,05 ; ∆Y4=218,7 sin410=143,48;
∆X5=201,18 cos1290+02/60= -126,7; ∆Y5=201,18 sin129+02/60=156,27.
Знаки приращений определяются в зависимости от дирекционных углов (Рис. 1, табл. 2).
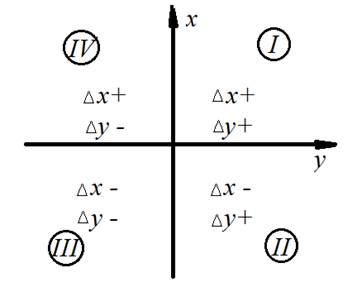
Рис.1. Схема определения знаков приращений координат
Таблица 2
|
Четверть |
Предельные изменения дирекционного угла - α |
Румб - r |
Знаки приращений координат |
||
|
Наимено-вание |
Связь с дирекционным углом |
X |
Y |
||
|
I |
От 00 до 900 |
СВ |
r=α |
+ |
+ |
|
II |
От 900 до 1800 |
ЮВ |
r=1800 - α |
- |
+ |
|
III |
От 1800 до 2700 |
ЮЗ |
r=α - 1800 |
- |
- |
|
IV |
От 2700 до 3600 |
СЗ |
r=3600-α |
+ |
- |
Вычислить приращения координат последовательно по всему ходу с точностью до 0,01м, суммировать их по столбцам ∆Х и ∆Y, складывая сначала все положительные, а затем отрицательные значения. Суммарный результат даст величины å∆Хвыч и å∆Yвыч.
å∆Хвыч= ;
å∆Yвыч= ;
Невязки приращений координат – это разности их вычисленного и теоретического значения
f∆X=å∆Хвыч - å∆Хтеор;
f∆Y=å∆Yвыч - å∆Yтеор;
Так как ход замкнут. то теоретические суммы приращений координат
å∆Хтеор=0;
å∆Yтеор=0;
и невязки координат будут равны вычисленным суммам приращений координат:
f∆X=å∆Хвыч = ;
f∆Y=å∆Yвыч = ;
Вычислить абсолютную невязку ∆Р и относительную невязку ∆Р/Р и сравнить с допустимой, где Р – длина хода.
Здесь ![]() =
=
![]()
Если невязка ∆Р/Р удовлетворяет указанному допуску, то невязки f∆Xи
f∆Y нужно распределить на каждое приращение с обратным знаком пропорционально длине линии
![]()
![]()
где
![]() и
и ![]() -
поправки к приращениям с точностью до 0,01 м; Р и di – длина
периметра и соответствующей стороны в сотнях метров.
-
поправки к приращениям с точностью до 0,01 м; Р и di – длина
периметра и соответствующей стороны в сотнях метров.
Вычисление:
Контроль: [å![]() ]= - f∆Xi, [å
]= - f∆Xi, [å![]() ]= - f∆Yi.
]= - f∆Yi.
Вычислить координаты X и Y, получая координаты каждой последующей вершины с соответствующим исправленным приращением:
Контролем правильности вычислений служит получение значений координат конечного исходного пункта XI и YI (он же начальный пункт).
Все вычисления приведены в ведомости.
Обработка журнала нивелирования трассы
Отсчеты по рейкам на всех станциях записаны в журнале нивелирования. В графах 5 и 6 вычисляют превышения, определяемые по отсчетам черных и красных сторон реек, по формулам:
h=З - П( задний отсчет минус передний);
hч=aч - вч;
hк=aк – вк;
Это будут превышения между связующими точками Rp31 – ПК0; ПК0 – ПК3; ПК3 – ПК5 и т.д.
Если разность черного и красного превышений в графах 5 и 6 не превышает ±10мм, то вычисляют среднее значение
Например, на первой станции отсчет на заднюю точку RрЗ1 по черной стороне рейки 1139, на переднюю точку (ПК0) – черный отсчет 0784.
Превышение будет
hч=1139 – 0784= +0355; hк=5388 – 5035= +0353;
hч – hк =2мм<10мм, поэтому находим среднее превышение hср= +0354 и записываем в графу 7 журнала нивелирования.
В таблице журнала нивелирования на станции 8 задняя точка ПК6, передняя – ПК7. Это связующие точки.
Здесь hч=1038 – 2472=-1434; hк=5289 – 6724=-1435;
hср = -1434 - записываем в графы 5-7 в строке задней связующей точки
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.