
Физическую величину на выходе чувствительного элемента называют выходной величиной объекта управления. Как правило, это электрический сигнал (ток, напряжение) или механическое перемещение.
Управляющее воздействие u(t) - это воздействие, прикладываемое к управляющему органу объекта с целью поддержания требуемых значений управляемой величины. Оно формируется устройством управления. Ядром устройства управления является исполнительный элемент, в качестве которого может использоваться электрические или поршневые двигатели, мембраны, электромагниты и т.п.
Задающим устройством называется устройство, задающее программу изменения управляющего воздействия, то есть формирующее задающий сигнал uо(t). В простейшем случае uо(t)=const. Задающее устройство может быть выполнено в виде отдельного устройства, быть встроенным в управляющее устройство или же вообще отсутствовать.
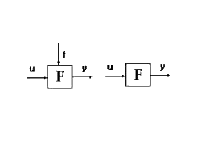
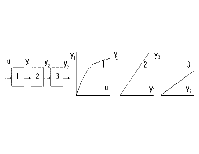
Любую систему автоматического управления можно представить в виде функциональной схемы, элементы которой называются функциональными звеньями. Эти звенья изображаются прямоугольниками, в которых записывается функция преобразования входной величины в выходную.
Входные и выходные величины могут иметь одинаковую или различную природу, например, входное и выходное электрическое напряжение, или электрическое напряжение на входе и скорость механического перемещения на выходе и т.п.
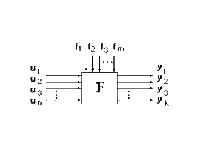
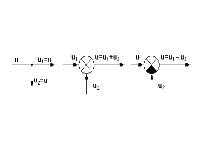
Величина f(t), подаваемая на второй вход звена, называется возмущением. Она отражает влияние на выходную величину y(t) изменений окружающей среды, нагрузки и т.п. В общем случае функциональное звено может иметь несколько входов и выходов. Здесь u1,u2,...,un - входные (управляющие) воздействия; f1,f2,...,fm - возмущающие воздействия; y1,y2,...,yk - выходные величины.
Принцип работы функциональных звеньев может быть различным, поэтому функциональная схема не дает представление о принципе действия конкретной САУ, а показывает лишь пути прохождения и способы обработки и преобразования сигналов. Сигнал - это информационное понятие, соответствующее на принципиальной схеме физическим величинам. Пути его прохождения указываются направленными отрезкам.
Точки разветвления сигнала называются узлами. Сигнал определяется лишь формой изменения физической величины, он не имеет ни массы, ни энергии, поэтому в узлах он не делится, и по всем путям от узла идут одинаковые сигналы, равные сигналу, входящему в узел. Суммирование сигналов осуществляется в сумматоре, вычитание - в сравнивающем устройстве.
Принято различать три фундаментальных принципа управления: принцип разомкнутого управления, принцип компенсации, принцип обратной связи. 1. Принцип разомкнутого управления
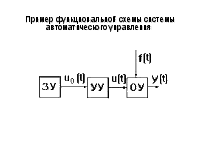
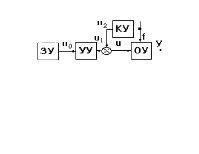
Пример функциональной схемы системы автоматического управления
В данной схеме заложен принцип разомкнутого управления, сущность которого состоит в том, что программа управления жестко задана ЗУ; управление не учитывает влияние возмущений на параметры процесса.
2. Принцип компенсации Если возмущающий фактор искажает выходную величину до недопустимых пределов, то применяют принцип компенсации
Пусть yо - значение выходной величины, которое требуется обеспечить согласно программе. На самом деле из-за возмущения f на выходе регистрируется значение y. Величина e = yо - y называется отклонением от заданной величины. Если каким-то образом удается измерить величину f, то можно откорректировать управляющее воздействие u на входе объекта управления, суммируя сигнал управляющего устройства с корректирующим воздействием, пропорциональным возмущению f и компенсирующим его влияние.
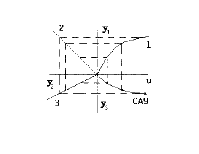
3. Принцип обратной связи Наибольшее распространение в технике получил принцип обратной связи. Здесь управляющее воздействие корректируется в зависимости от выходной величины y(t). И уже не важно, какие возмущения действуют на объект управления. Если значение y(t) отклоняется от требуемого, то происходит корректировка сигнала u(t) с целью уменьшения данного отклонения. Связь выхода объектом управления с его входом называется главной обратной связью.
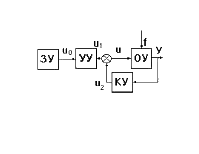
Пример системы управления с обратной связью
В данном случае задающее устройство формирует требуемое значение
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.