Объектом управления называется устройство, в котором осуществляется управление рабочим процессом. Объектом управления может быть как машина в целом (например, автомобиль, робот, технологический объект),так и ее составная часть (например, двигатель внутреннего сгорания, рука автоматического манипулятора, тормозное устройство). Исполнительные органы оказывают непосредственное воздействие на объект управления в соответствии с алгоритмом управления. В качестве исполнительных органов в гидропневмосистемах применяются цилиндры, поворотные двигатели, мембранные камеры. Исполнительные органы бывают двухпозиционные и многопозиционные. Управляющая часть включает в себя контролирующие устройства, распределители и логический блок управления (БУ). Распределители служат для соединения рабочих полостей исполнительных органов либо с источником давления рабочей среды, либо со сливной магистралью (выходом в атмосферу). Переключение распределителей из одной позиции в другую осуществляется под действием внешних сигналов, поступающих от БУ. БУ образуется набором различных логических устройств, соединенных между собой каналами связи. В состав БУ входят отдельные функциональные устройства (субблоки), выполняющие специальные логические операции или отдельные функциональные задачи, например, субблок последовательности операций, субблок выходов, субблок задержек. К БУ поступают сигналы от контролирующих устройств и от пульта управления. С пульта управления могут подаваться сигналы на БУ как в рабочем, так и в наладочном режиме. Кроме того, на пульт управления могут поступать сигналы от БУ, например, сигналы индикации номеров операций, результатов измерения рабочих процессов. К контролирующим устройствам относятся различного вида датчики, конечные выключатели, преобразователи. Контролирующие устройства воспринимают параметры рабочего процесса и генерируют сигналы, поступающие в БУ. Часто в системах управления датчики (конечные выключатели) фиксируют перемещение исполнительных органов и подают соответствующие сигналы в БУ. Этим осуществляется обратная связь в системе управления по положению. По способам контроля выполнения команд различают виды управления - управление путевое, в функции давления, временное, смешанное. Может осуществляться также контроль по давлению, по времени. По характеру передаваемых сигналов системы управления подразделяются на непрерывные (аналоговые) и дискретные.
В непрерывных (стабилизирующих, следящих) системах нет жестко фиксированных положений исполнительных органов, положение исполнительного органа обуславливается уровнем давления воздуха или жидкости, подаваемой в него. В дискретных системах исполнительные органы имеют фиксированные рабочие положения и применяется управляющая аппаратура с релейными характеристиками. Сигналы управления в дискретных системах принимают одно из двух значений: “1” (есть давление) и “0” (нет давления). В дискретной системе управления могут применяться отдельные элементы непрерывного действия.
На рисунке 2.1 показана схема простейшей системы управления, в которую входят три исполнительных органа (цилиндры) Ц1, Ц2, Ц3, логический блок управления БУ, распределители Р1, Р2, РЗ, пульт управления П. На схеме также приведены конечные выключатели (по два на каждый цилиндр). Объект управления и энергетическая часть на схеме не показаны.
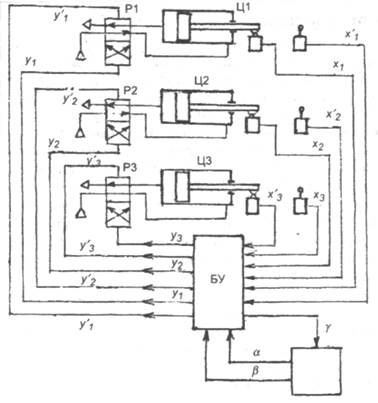
Рисунок 1.1– Общая схема системы управления
Система управления, согласно рисунка 2.1, может управлять рукой манипулятора с тремя степенями подвижности. Например, выдвижение руки с помощью Ц1, захват и удержание детали захватным устройством, приводимым в движение исполнительным органом Ц2, перемещение детали в горизонтальной или же в вертикальной плоскости, осуществляемое ЦЗ. Положение поршня каждого исполнительного органа контролируется конечными выключателями, сигналы x1, x’1, x2, x’2, x3, x’3, от которых поступают в БУ. В соответствии с алгоритмом функционирования манипулятора, БУ вырабатывает выходные сигналы у1, у’1, у2, у’2, у3, у’3, управляющие распределителями Р1, Р2 и РЗ, которые подключены к рабочим полостям цилиндров. Выходные сигналы также, как и входные, по физической природе могут
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.