Насосы такого типа широко используются в машиностроении в основном на металлорежущих станках. Рассмотрим принципиальную схему гидропривода многоцелевого станка типа «обрабатывающий центр».
В этой группе оборудования гидроприводы широко используются для автоматизации смены инструмента и обрабатываемой детали, уравновешивания вертикально расположенных рабочих органов, в фиксирующих и зажимных механизмах, устройствах выборки люфтов в кинематических цепях, в приводах механизмов переключения скоростей, гидростатических подшипниках и направляющих, в блокирующих механизмах, иногда - в приводах подач.
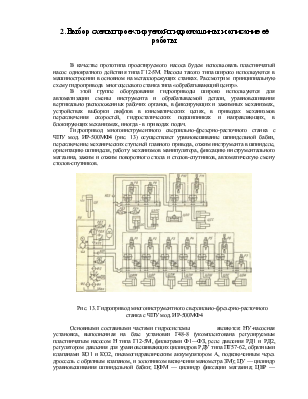
Гидропривод многоинструментного сверлильно-фрезерно-расточного станка с ЧПУ мод. ИР-500МФ4 (рис. 13) осуществляет уравновешивание шпиндельной бабки, переключение механических ступеней главного привода, отжим инструмента в шпинделе, ориентацию шпинделя, работу механизмов манипулятора, фиксацию инструментального магазина, зажим и отжим поворотного стола и столов-спутников, автоматическую смену столов-спутников.
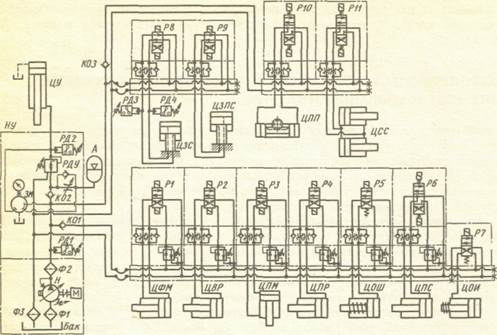
Рис. 13. Гидропривод многоинструментного сверлильно-фрезерно-расточного станка с ЧПУ мод. ИР-500МФ4
Основными составными частями гидросистемы являются: НУ-насосная установка, выполненная на базе установки Г48-8 (укомплектована регулируемым пластинчатым насосом Н типа Г12-5М, фильтрами Ф1—ФЗ, реле давления РД1 и РД2, регулятором давления для уравновешивающих цилиндров РДУ типа ПГ57-62, обратными клапанами КО1 и КО2, пневмогидравлическим аккумулятором А, подключенным через дроссель с обратным клапаном, и золотником включения манометра ЗМ); ЦУ — цилиндр уравновешивания шпиндельной бабки; ЦФМ — цилиндр фиксации магазина; ЦВР — цилиндр выдвижения «руки»; ЦПМ — цилиндр вертикального перемещения манипулятора; ЦПР — цилиндр поворота «руки»; ЦОШ — цилиндр ориентации шпинделя; ЦПС — цилиндр переключения скоростей; ЦОИ — цилиндр отжима инструмента; ЦЗС — цилиндр зажима стола-спутника; ЦЗПС — цилиндр зажима поворотного стола; ЦПП — цилиндр поворота платформы; ЦСС — цилиндры устройства автоматической смены столов-спутников; Р1 — Р6 — модульные комплекты (состоят из редукционного клапана, сдвоенного дросселя с обратным клапаном и распределителя с электроуправлением); Р7 — распределитель с электроуправлением; Р8 — Р11 — модульные комплекты (состоят из сдвоенного дросселя с обратным клапаном и распределителя с электроуправлением); РДЗ, РД4 — реле давления, контролирующие зажим стола-спутника; КОЗ — обратный клапан.
Гидросистема обеспечивает возможность независимой регулировки скорости движения цилиндров ЦФМ, ЦБР, ЦПМ, ЦПР, ЦОШ, ЦПС, ЦЗС, ЦЗПС, ЦПП и ЦСС в обоих направлениях, а также давления в цилиндрах ЦФМ, ЦБР, ЦПМ, ЦПР, ЦОШ и ЦПС. Применение регулируемого насоса и аккумулятора позволяет свести к минимуму потери мощности в гидроприводе. Движение каждого из рабочих органов производится после переключения соответствующего электромагнита распределителей Р1 — Р11 по команде, поступающей от системы ЧПУ. Регулятор РДУ поддерживает постоянное давление в штоковой полости цилиндра ЦУ независимо от направления и скорости движения шпиндельной бабки, определяемых приводом подачи. В переходных режимах и при движении на наибольшей скорости колебания давления в системе уравновешивания сглаживаются аккумулятором А.
Рабочий комплект насоса (рис. 14), состоящий из ротора 1 с пластинами 3, статора 4, наружного кольца 5, переднего 18 и заднего 15 распределительных дисков, установлен в соединенных между собой винтами корпусе 14 и крышке 19 и скреплен винтами 7. Шейки ротора опираются на подшипники скольжения, выполненные в распределительных дисках. Ротор шлицами связан с приводным валом 22, опирающимся на шарикоподшипники 20 и 29.
Рис. 14. Конструкция пластинчатого регулируемого насоса Г12-5М
В переднем диске выполнены пазы 24 и 17 для всасывания и нагнетания масла, а также пазы 16 и 25 для соединения обращенных к центру ротора торцовых поверхностей пластин с напорной (на участке нагнетания) или всасывающей (на участке всасывания) линиями. Задний диск имеет связанную с напорной линией кольцевую камеру 26, ограниченную шайбой 28 и кольцами 27.
При вращении ротора рабочий комплект сжимается давлением
масла в камере 26, а пластины под действием центробежной силы и давления масла
(на участке нагнетания) прижимаются к расположенной эксцентрично внутренней
поверхности статора, причем объемы рабочих камер, ограниченных двумя соседними
пластинами, ротором, статором и распределительными дисками, изменяются:
увеличиваются при движении камеры ниже оси 1-1 и уменьшаются в процессе ее
движения выше этой оси. Пазы 24 и 17 выполнены таким образом, что при
увеличении объемов камер последние постоянно связаны со всасывающей линией, а
при уменьшении - с напорной. Давление масла в зоне нагнетания создает усилие,
действующее на ротор сверху вниз (воспринимается подшипниками скольжения) и на
статор — снизу вверх (воспринимается опорой 6). Благодаря тому, что пазы 24 и 17
выполнены несимметрично относительно оси 1-1 (повернуты на некоторый угол ![]() в направлении вращения),
усилие, действующее на статор, отклоняется от вертикали, т.е. появляется
некоторая составляющая R этого усилия,
стремящаяся сдвинуть статор, опирающийся на неподвижную 30 и подвижную 6 опоры,
вправо, преодолевая
усилие пружины 10 регулятора давления. Последний содержит также корпус 8, толкатель 9, подпятник
11, регулировочный винт 12 и гайку 13. Наибольший эксцентриситет ограничивается
упором 2. Наружные утечки исключаются манжетой 21; утечки из корпуса отводятся
через дренажное отверстие 23.
в направлении вращения),
усилие, действующее на статор, отклоняется от вертикали, т.е. появляется
некоторая составляющая R этого усилия,
стремящаяся сдвинуть статор, опирающийся на неподвижную 30 и подвижную 6 опоры,
вправо, преодолевая
усилие пружины 10 регулятора давления. Последний содержит также корпус 8, толкатель 9, подпятник
11, регулировочный винт 12 и гайку 13. Наибольший эксцентриситет ограничивается
упором 2. Наружные утечки исключаются манжетой 21; утечки из корпуса отводятся
через дренажное отверстие 23.
Характеристики насосов приведены на рис.15. При увеличении
давления ![]() подача насоса Q медленно
снижается в связи с ростом внутренних утечек
подача насоса Q медленно
снижается в связи с ростом внутренних утечек
(![]() - номинальная подача). Когда давление достигает
величины
- номинальная подача). Когда давление достигает
величины ![]() , усилие R преодолевает сопротивление пружины, и при дальнейшем росте
давления подача Q резко уменьшается
практически до нуля, т. е. до величины утечек в гидросистеме при давлении
, усилие R преодолевает сопротивление пружины, и при дальнейшем росте
давления подача Q резко уменьшается
практически до нуля, т. е. до величины утечек в гидросистеме при давлении ![]() .
.
Рис. 15. Характеристики пластинчатых регулируемых насосов типа Г12-5М:
а, б, в - статические; г – осциллограмма переходного процесса
Изменение статических характеристик может быть обеспечено заменой пружин (б) или регулировкой упора ограничения эксцентриситета (в). При резком изменении расхода масла, поступающего в гидросистему, и высокой жесткости напорной линии возможны значительные колебания давления в переходных режимах. На рис.15. (г) приведена осциллограмма изменения давления в напорной линии, состоящей из стального трубопровода диаметром 20мм, длиной 150мм между насосом и запирающим распределителем и двух отводов медными трубками 6X0,8 мм длиной по 150мм к датчику давления и манометру, который при осциллографировании закрывался вентилем. При изменении расхода масла от номинальной подачи насоса
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.