



8. Автоматизация и телемеханизация городских электросетей.
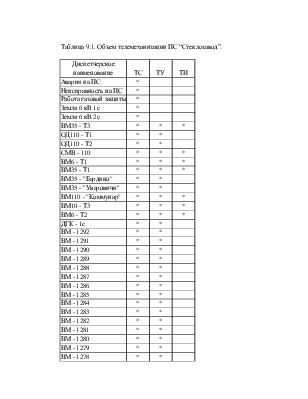
В Гомельском РЭС введена в эксплуатацию система телемеханики “Сириус”, позволяющая передавать с объекта на диспетчерский пульт РЭС сигнализацию о положении коммутационных аппаратов, наличии неисправ- ностей, срабатывании защит, телеизмерения текущих параметров – токов нагрузки, напряжений линейных и фазных, мощностей активных и реактив- ных , телеуправление объектами с дискретным состоянием .
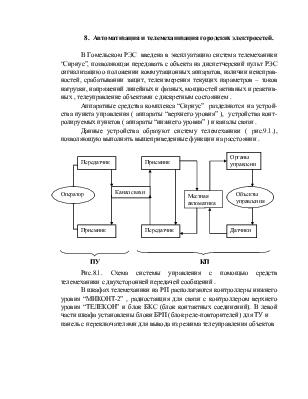
Аппаратные средства комплекса “Сириус” разделяются на устрой- ства пункта управления ( аппараты “верхнего уровня” ), устройства конт-ролируемых пунктов ( аппараты “нижнего уровня” ) и каналы связи .
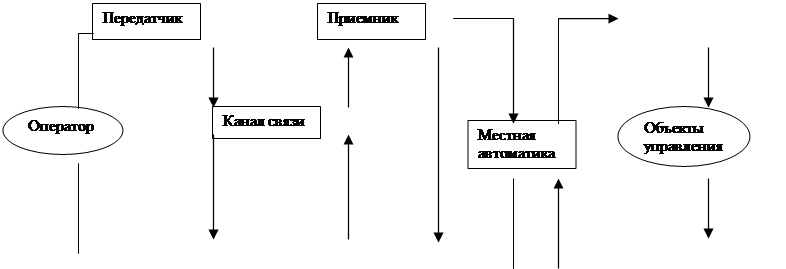
Данные устройства образуют систему телемеханики ( рис.9.1.), позволяющую выполнять вышеприведенные функции на расстоянии .
|
|
|
|
ПУ КП
Рис.8.1. Схема системы управления с помощью средств телемеханики с двухсторонней передачей сообщений .
В шкафах телемеханики на РП располагаются контроллеры нижнего уровня “МИКОНТ-2” , радиостанция для связи с контроллером верхнего уровня “ТЕЛЕКОН” и блок БКС (блок контактных соединений). В левой части шкафа установлены блоки БРП (блок реле-повторителей) для ТУ и панель с переключателями для вывода из режима телеуправления объектов
ТУ. Питание контроллера и
радиостанции осуществляется от сети переменного тока 220В собственных нужд РП с
обязательным резервированием.![]()
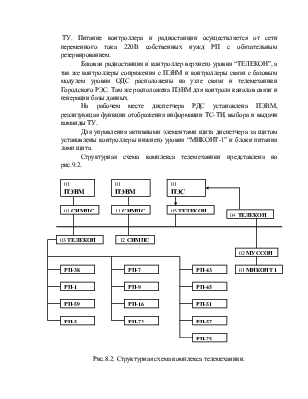
Базовая радиостанция и контроллер верхнего уровня “ТЕЛЕКОН”, а так же контроллеры сопряжения с ПЭВМ и контроллеры связи с базовым модулем уровня ОДС расположены на узле связи и телемеханики Городского РЭС. Там же расположена ПЭВМ для контроля каналов связи и генерации базы данных.
На рабочем месте диспетчера РДС установлена ПЭВМ, реализующая функции отображения информации ТС-ТИ, выбора и выдачи команды ТУ.
Для управления активными элементами щита диспетчера за щитом установлены контроллеры нижнего уровня “МИКОНТ-1” и блоки питания ламп щита.
Структурная схема комплекса телемеханики представлена на рис.9.2.
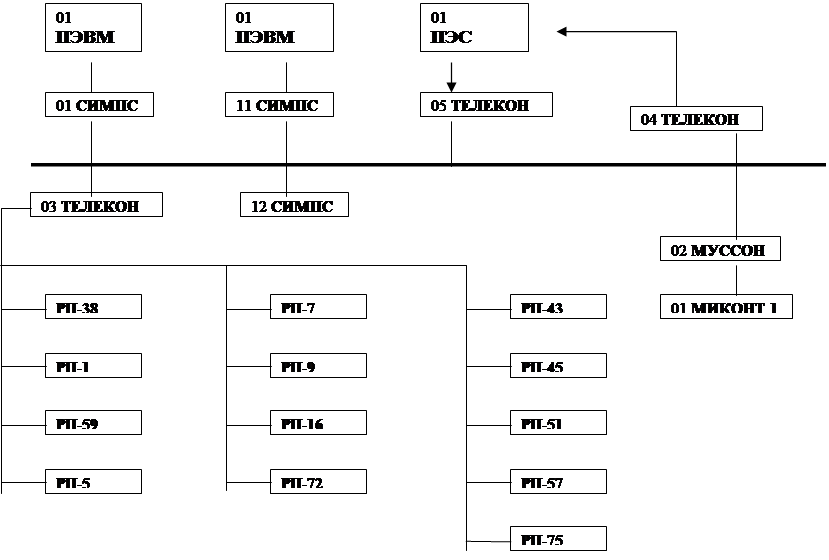
Рис.8.2. Структурная схема комплекса телемеханики.
Оперативнaя информация, передаваемaя no сети, бывает следующиx видов : телеизмерения (ТИ) — для передачи величины контролируемыx параметров, телесигналы (ТС) — для контроля состояния коммутацион- ной аппаратуры, алфавитнoцифровая (АЦИ), служебная . Источниками ТИ, ТС являются датчики-преобрaзователи активной и реактивной мощ- ности, токa, напряжения, частоты, a также контакты реле-повторителей положения высоковольтныx выключателей и разъединителей. Этa инфор- мация c помощью датчиков и устройств телемеxаники передается на дис- петчерские пункты энергосистем, где принимается и вводится в ЭВМ, a также выводится на мнемосxему. Часть информации может ретранслиро- ватьcя на более высокие уровни управления.
Рассмотрим более подробно основные виды сообщений .
Телесигнализация (ТС)- передача устройствами телемеханики дис- кретных сигналов о положении и состоянии контролируемых объектов либо процессов . По своему характеру ТС подразделяются на двухпози- ционную для объектов , которые могут находиться в одном из двух положе- ний : включено-отключено, открыто-закрыто и т.д., и однопозиционную, определяющую наличие того или иного события, например : авария, неисправность, превышение показателей заданного уровня и т.п.
Телеизмерение (ТИ)- передача устройствами телемеханики инфор- мации о значениях контролируемых параметров . При ТИ передача значе- ния измеряемой величины осуществляется путем преобразования этой величины в другую, вспомогательную, более удобную для передачи по каналу связи, и последующего преобразования этой величины в показания прибора либо элемент компьютерной базы данных на пункте управления . По значениям параметров ТИ подразделяются на телеизмерения текущих значений (ТИТ) и телеизмерения интегральных значений параметров (ТИИ). ТИТ характеризует мгновенное значение параметра, например, ток, напряжение, мощность и т.п. ; ТИИ характеризует значение параметров за определенное время, например : активная и реактивная электроэнергия и др.
Телеуправление (ТУ)- передача устройствами телемеханики диск- ретных сигналов, воздействующих на исполнительные органы контроли- руемых объектов , имеющих ряд дискретных положений .
Поскольку системы телемеханики в электрических сетях приме- няются для обмена сообщениями между оперативным персоналом и объектами, то на входе устройств ТИ и ТС включаются датчики, дающие информацию без участия человека, а на выходе – устройства преобразующие сообщения в форму, которую человек может воспринимать или которая удобна для ЭВМ . На входе устройств ТУ устанавливаются ключи, кнопки , реле или другие устройства , а на выходе - исполнитель- ные органы ( приводы выключателей ) . На основании выше указанного можно сказать, что система телемеханики состоит из устройств телемеха- ники ПУ и КП, соединенных каналами связи и дополнительно включает в себя устройства ввода-вывода информации . На ПУ - это устройство отоб-ражения и ввода оперативной информации
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.