Інститут підприємництва і сучасних технологій
Кафедра економічної кібернетики
Реферат
з курсу
“Теорія систем і системний аналіз”
за темою
«Кібернетичний підхід до опису систем.
Управління економічними системами»
заочної форми навчання
за спеціальністю
”Економічна кібернетика”
План контрольной работы:
|
Стр. |
|
|
Вступление…………………………………………..………….……. |
3 |
|
Понятие управления………………………………………………..…… |
4 |
|
1. Условия существования системы управления............................. |
5 |
|
2. Виды связей в системах управления................................................. |
11 |
|
3. Виды управления …………………………………………..…….… |
12 |
|
4. Этапы управления ……..…………………………………………… |
17 |
|
Выводы….. …………………………………………………………… |
22 |
|
Список литературы…………………………………………………… |
23 |
Вступление
Кибернетика исследует весьма специфический предмет— системы и процессы управления. Она характеризуется новыми подходами к анализу и синтезу сложных динамических объектов. Кибернетике присущ системный подход, позволяющий рассматривать явление во всей его сложности, с учетом всех имеющихся связей и свойств. Это позволяет выявить, познать и рациональноиспользовать закономерности управления в природе, обществе и искусственно создаваемых системах. Вместе с тем, развитие кибернетикипотребовало переосмысления некоторых старых понятий, сложившихся и общественной практике, и формализации представлений терминологическою характера, являющихся исходной базой при изучении сложных систем управления различной природы.
Понятие управления
Наличие управления является существенным признаком сложной системы, обеспечивающим ее целостность
Управление — это целенаправленное воздействие одной системы на другую для изменения ее поведения (состояния) в соответствии с изменяющимися условиями внешней среды.
Понятие управления является базовым в кибернетике, поскольку определяет предмет исследования этой науки. Любую систему, которая является объектом кибернетического исследования, можно представить в виде системы управления.
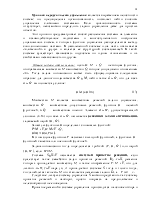
Системой управления называется организованная динамическая система с обратной связью, в которой реализуются причинно-следственные связи с помощью, по крайней мере, двух каналов (рис.1).
 |
Рисунок 1. Схема организации системы управления
Пусть х характеризует вход, определяющий цель функционирования системы управления S. Управляющая система S1вырабатывает управляющие воздействия т, передаваемые на вход управляемой системы S2. На систему Sоказывают влияние возмущающие воздействия w. Результаты работы системы у по каналу обратной связи поступают на вход S1, анализируются и используются для выработки последующих управляющих воздействий. Сказанное позволяет выполнить формализацию, которая определяет правила функционирования системы управления S.
Начало процесса управления: S1 вырабатывает управляющее воздействие х = F(y), исходя из цели управления и априорной информации о законах функционирования системы во внешней среде А, если таковая имеется:
S1 : х×А®т (1)
Реакция объекта управления под действием возмущений:
S2:m×w ® y (2)
На следующем шаге подсистема S1, при принятии решений использует данные об у (фактическом) и прогнозные значения w:
S3: x×y×w ® m(3)
1. Условия существования системы управления
Главными условиями существования системы управления являются следующие:
1. Организованность: в системе управления выделяются элементы, которые относятся либо к управляющей, либо к управляемой подсистеме:
S = S1 U S2
2. Разнообразие: каждая из двух выделенных подсистем должна допускать возможность появления нескольких (многих) состояний
хÎХ, yÎY, mÎM, X≠Æ, Y≠Æ, M≠Æ.
Примечание: проблема оценки разнообразия управляющей системы и ее соотношения с разнообразием управляемого объекта имеет важное теоретическое и практическое значение.
Закон необходимого разнообразия формулируется У. Р. Эшби следующим образом: «количество исходов управляемой системы, если оно минимально, может быть еще уменьшено только за счет соответствующего увеличения разнообразия управляющей системы». Это значит, что для решения задачи управления необходимо, чтобы информационная мощность управляющей системы (или ее собственное информационное разнообразие) была не меньше разнообразия объекта управления (т. е. решаемой задачи управления).
Пусть в дискретные моменты времени t = T/Dt происходит изменение вектора х (t) входов объекта управления, а управляющая система вырабатывает вектор m(t) управляющих воздействий, в результате которых состояние объекта управления определяется как u(t) = g(x(t),m(t),·).
Перевод управляемого объекта из состояния и (t) в некоторое состояние u(t + 1) требует решения задачи прогнозирования x(t+ 1), оценки параметров системы, решения задачи идентификации и (t), выбора подходящего m(t + 1):
u(t +1) = φ(x(t+ l),m(t + 1), u(t),·).
Если разнообразие задачи управления, измеряемое количеством информации, определить как V, а информационную мощность управляющей системы W, то для осуществления перехода u(t)®u(t+l) необходимо, чтобы в каждый момент времени t выполнялось условие W(t) ³V(t).
В реальных системах управления «полное» разнообразие объекта управления и воздействий внешней среды настолько велико, что последнее условие, вообще говоря, не выполняется. Поэтому управляющая система формирует гомоморфную модель, использует принцип управления воздействием на «главный» фактор, прибегая к агрегированию, линеаризации связей, аппроксимируя стохастические зависимости детерминированными и проч. Часто воздействия неучтенных в моделях факторов вводятся в модель с помощью так называемого «внешнего дополнения». Согласно концепции английского кибернетика Ст. Бира, некий «черный ящик» служит дополнением к модели объекта
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.