МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙ КОЙ ФЕДЕРАЦИИ
Тольяттинский государственный университет
Кафедра «Электромеханика»
ДИНАМИЧЕСКИЕ ЛИНЕЙНЫЕ СИСТЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методическое руководство к лабораторным работам
Тольятти 2002
УДК 62 – 52
Динамические линейные системы автоматического управления: Методическое руководство к лабораторным работам\ Сост. Денисов В.А., Третьякова М.Н., Калинина Н.А. – Тольятти: ТГУ, 2002.
Приведены краткие теоретические сведения, цели, программы выполнения и контрольные вопросы цикла лабораторных работ по курсу «Теория автоматического управления».
Изложена методика моделирования и исследования динамических линейных систем автоматического управления с помощью средств виртуальной электронной лаборатории Electronics Workbench.
Для студентов специальности 180100 «Электромеханика».
Табл. 14. Ил. 9.
Составители: Денисов В.А., Третьякова М.Н., Калинина Н.А.
Научный редактор:
Утверждено научно-методическим советом ТГУ.
Ó Тольяттинский государственный университет, 2002
Настоящее учебное пособие содержит описание пяти лабораторных работ по разделу «Динамические системы автоматического управления» дисциплины «Теория автоматического управления».
В лабораторных работах рассмотрены вопросы математического описания динамических систем, построения моделей исследования типовых звеньев, анализа устойчивости и точности работы замкнутых систем, влияния нулей и полюсов передаточной функции на динамические свойства систем автоматического управления (САУ).
Описание каждой лабораторной работы включает краткие теоретические сведения, порядок выполнения работы, содержание отчета, контрольные вопросы к защите работы и список рекомендуемой литературы.
Выполнение лабораторных работ предполагает самостоятельное предварительное изучение настоящих материалов и рекомендуемых тем литературных источников, а также проведение необходимых расчетов и построения схем моделирования.
Лабораторные работы выполняются методом математического моделирования с использованием прикладного пакета программ Electronics Workbench, позволяющего процесс моделирования максимально приблизить к эксперименту, осуществить необходимые исследования динамических систем автоматического управления с получением качественных и количественых результатов.
Однако для грамотного исследования динамических систем автоматического управления недостаточно только научиться правильно пользоваться прикладным пакетом, необходимо, при этом, хорошо знать физику работы отдельных звеньев САУ, понимать их взаимосвязь и взаимозависимость, что требует должного уровня теоретической подготовки по курсу “Теория автоматического управления”, его постоянного повышения.
Лабораторная работа №1
МОДЕЛИРОВАНИЕ ЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
1. ЦЕЛЬ РАБОТЫ.
Ознакомиться с пакетом прикладных программ Electronics Workbench. Освоить основные приемы моделирования систем автоматического управления.
2. УКАЗАНИЯ К САМОСТОЯТЕЛЬНОЙ РАБОТЕ.
До начала работы необходимо по литературе [1], [2] и по данным методическим указаниям ознакомиться с основными компонентами, измерительными приборами и возможностями прикладного пакета программ Electronics Workbench, а также с методом математического моделирования САУ путем понижения порядка дифференциального уравнения.
3. КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ.
3.1.Подготовка математического описания динамических линейных систем автоматического управления к моделированию.
Поведение динамической линейной системы автоматического управления может быть описано скалярным дифференциальным уравнением n-го порядка
|
где y - выходная переменная; u – входной сигнал; m – порядок производной входного сигнала; ai и bj – постоянные коэффициенты.
При условии, что m<n, уравнение (1.1) можно записать в виде системы уравнений первого порядка
 |
|
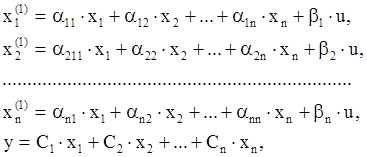
где xi – координаты вектора состояния, aii и bi – постоянные коэффициенты.
Система уравнений (1.2) может быть представлена в компактной векторно-матричной форме
|
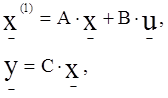
где A – n*n – мерная матрица постоянных коэффициентов системы; В – n*1 – мерная матрица постоянных коэффициентов входа; c – 1*n – мерная матрица постоянных коэффициентов выхода; X - n-мерный вектор состояния.
3.2.Описание основных компонентов пакета прикладных программ Electronics Workbench.
Пакет используется для математического моделирования и исследования систем автоматического управления. Программа легко осваивается и достаточно проста в работе. Содержит необходимые блоки моделирования и комбинацию контрольно-измерительных приборов, по внешнему виду и техническим характеристикам, приближенным к их промышленным аналогам.
3.2.1. Компоненты библиотеки Controls.
![]()
К Масштабирующий блок (усилитель)
Диалоговое окно позволяет задать следующие параметры:
К – коэффициент усиления;
VIOFF - Постоянная составляющая на входе;
VOOFF - Постоянная составляющая на входе.
+
+
+
Напряжение на выходе блока определяется по формуле:
![]()
где KOUT - Общий коэффициент усиления блока;
KA, KB, KC - коэффициенты усиления по входам A, B, C;
VAOFF, VBOFF, VCOFF - постоянные составляющие по входам А, B, C;
Параметры:
K - коэффициент усиления;
VIOFF - постоянная составляющая на входе;
VL, VU - предельные значения выходного напряжения отрицательной и положительной полярности;
VS - скорость изменения выходного напряжения;
VOIC - начальное напряжение на выходе;
(VIOFF, VOIC - установка начальных условий).
![]()
Параметры:
K - коэффициент усиления;
VIOFF - напряжение постоянной составляющей на входе;
VL, VU - предельные значения выходного напряжения отрицательной и положительной полярности;
VS - Скорость изменения входного напряжения.
Позволяет создавать передаточную функцию:
![]()
где: p – оператор Лапласа;
К – коэффициент усиления;
А и В – коэффициенты полиномов P(p) и Q(p);
VIOFF – постоянная составляющая на входе;
w – угловая частота;
VINT – установка начальных условий в режиме интегратора.
Коэффициент B1=1;
Остальные коэффициенты полиномов равны нулю.
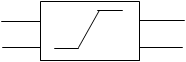 |
Параметры установки:
К – коэффициент усиления;
VIOFF – напряжение постоянной составляющей на входе;
![]() VL, VU –
значения насыщения выходного напряжения на нижнем и верхнем уровне;
VL, VU –
значения насыщения выходного напряжения на нижнем и верхнем уровне;
VS – скорость изменения входного напряжения.
а) Путем увеличения значения К можно имитировать релейную характеристику б) Введение отрицательного значения VIOFF позволяет имитировать характеристику звена с зоной нечувствительности
![]() Звено с гистерезисной характеристикой
Звено с гистерезисной характеристикой
Параметры установки:
VOH – ограничение сверху;
VOL – ограничение снизу;
H – ширина петли гистерезиса;
VIL, VIH – значения параметров формирования вертикальных ветвей характеристики;
ISD – коэффициент нелинейности вертикальных ветвей характеристики
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




