Современные проблемы автоматизации и управления
Лекции проф. для магистров
Лекция 2. (25.09.09).
Содержание предыдущей лекции. Кратко изложена история получения погрешностей соотношений аналоговых (непрерывных) и решетчатых (импульсных) временных функций. Описаны недостатки использования соотношения Котельникова - Шеннона, обосновано преобразование Лайнвиля. Начато решение примера использования этого преобразования для оценки различия (погрешности) дискретных и аналоговых функций, которое продолжено в этой лекции.
Глава 1. Погрешности преобразования информации в дискретных системах автоматического управления (ДСАУ)
1.3. Примеры расчёта погрешностей преобразования информации в ДСАУ (продолжение решения примера 1)
Для
непрерывного интегратора, очевидно, при подстановки ![]() в
формулу (1. 13) получим:
в
формулу (1. 13) получим:
![]() (1.19)
(1.19)
Запишем
аналогичное выражение для дискретного интегратора, при подстановки ![]() в выражение (1. 15). Модуль
в выражение (1. 15). Модуль ![]() будет выглядеть следующим образом:
будет выглядеть следующим образом:
 (1.20)
(1.20)
Примечание составителя. (Дениса Мокринского)
Полезно
вспомнить, что преобразование (1.16) является частным случаем преобразования
Мебиуса и называется «Билинейным». Билинейное преобразование — конформное
отображение, используемое для того, чтобы преобразовать передаточную функцию Kн(s) модели линейной
стационарной системы (регуляторы, фильтры) из непрерывной формы в дискретную
(ДПФ) Kд(z). Оно отображает точки "![]() " оси ординат, расположенные на
"s"-плоскости, в точки окружности единичного
радиуса на "z"-плоскости. Это преобразование сохраняет
устойчивость исходной непрерывной системы и существует для всех точек её
передаточной функции. То есть для каждой точки передаточной функции или АФХ
модели исходной системы существует подобная точка с идентичной фазой и
амплитудой модели дискретной системы. Однако эта точка может быть расположена
на другой частоте. Эффект сдвига частот практически незаметен при их небольших
значениях, однако существенен при частотах, близких к 0,5ωк. Интересно,
что билинейное преобразование представляет собой функцию, аппроксимирующую
экспоненту, которая является точным отображением "z"-плоскости на
"s"-плоскость, действительно:
" оси ординат, расположенные на
"s"-плоскости, в точки окружности единичного
радиуса на "z"-плоскости. Это преобразование сохраняет
устойчивость исходной непрерывной системы и существует для всех точек её
передаточной функции. То есть для каждой точки передаточной функции или АФХ
модели исходной системы существует подобная точка с идентичной фазой и
амплитудой модели дискретной системы. Однако эта точка может быть расположена
на другой частоте. Эффект сдвига частот практически незаметен при их небольших
значениях, однако существенен при частотах, близких к 0,5ωк. Интересно,
что билинейное преобразование представляет собой функцию, аппроксимирующую
экспоненту, которая является точным отображением "z"-плоскости на
"s"-плоскость, действительно:  .
.
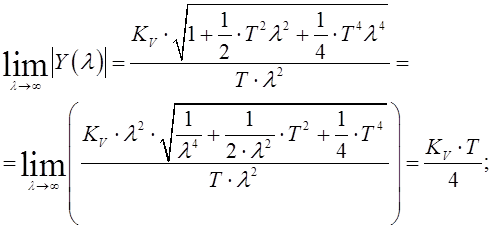
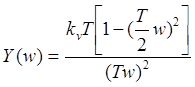
Теперь сравним ![]() для 2-х рассматриваемых
моделей. Для этого необходимо высчитать значение
для 2-х рассматриваемых
моделей. Для этого необходимо высчитать значение ![]() на характерных частотах. В
качестве первой исследуемой частоты выберем 0,5ωк, как известно на данной частоте
наблюдается наибольшее перекрытие спектра дискретного сигнала, (т. к. частоты выше 0,5ωк являются зеркальным отображением нижних частот [Д.
М.]). Для аналоговой системы получим:
на характерных частотах. В
качестве первой исследуемой частоты выберем 0,5ωк, как известно на данной частоте
наблюдается наибольшее перекрытие спектра дискретного сигнала, (т. к. частоты выше 0,5ωк являются зеркальным отображением нижних частот [Д.
М.]). Для аналоговой системы получим:
 (1.21)
(1.21)
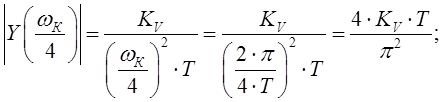
Для дискретной системы получим:
 (1.22)
(1.22)
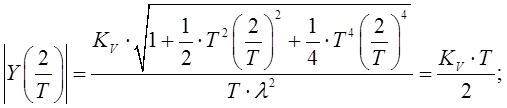
В качестве второго характерного значения псевдо -
частоты выберем ![]() , ей будет
соответствовать частота
, ей будет
соответствовать частота ![]() .
Для аналоговой системы получим:
.
Для аналоговой системы получим:
 (1.23)
(1.23)
Для дискретной системы получим:
 (1.24)
(1.24)
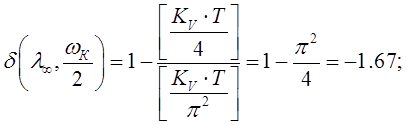
Определим погрешность дискретного преобразования, относительно «эталонного» аналогового:
 (1.25)
(1.25)
 (1.26)
(1.26)
Итак, получили, что при больших частотах ошибка достигает 146%! Не стоит забывать, что большим частотам во временной области соответствует начальный участок переходного процесса.
 (1.27)
(1.27)
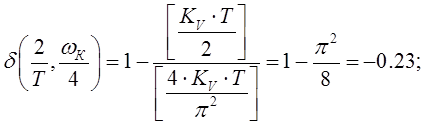
Видно, что на частоте в 2 раза меньшей ![]() суммарная погрешность дискретизации
и билинейного преобразования составляет –23%. Знак «–» не случаен, он говорит о
том, что амплитуда спектра дискретного сигнала в каждой точке складывается из
основной амплитуды спектра и из "зеркальных" его
отображений (см. рис. 2. 1.)
суммарная погрешность дискретизации
и билинейного преобразования составляет –23%. Знак «–» не случаен, он говорит о
том, что амплитуда спектра дискретного сигнала в каждой точке складывается из
основной амплитуды спектра и из "зеркальных" его
отображений (см. рис. 2. 1.)
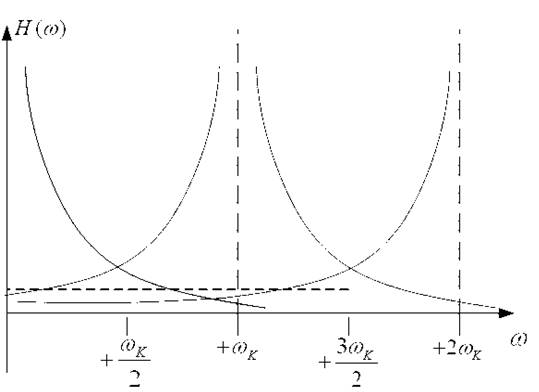
Рис. 2.1. Перекрытие составляющих спектра дискретного (импульсного) сигнала.
Пример 2.Найдем спектры блоков дискретного интегратора "прямоугольниками с упреждением" и интегратора "прямоугольниками с экстраполятором нулевого порядка (рис. 2. 2.)
 |
Рис.2. 2. Схема блока интегратора прямоугольниками с экстраполятором
Для первой схемы имеем:
![]() (2.1.)
(2.1.)
Для схемы, изображенной на рис.2. 2., получим:
![]() (2. 2.)
(2. 2.)
Функции (2. 1.) и (2. 2.) при переводе в плоскость "w" приобретают одинаковые значения. Поэтому
 ,
, ![]() (2.
3.)
(2.
3.)
Соответственно из формулы (2. 3) найдем
![]() (2. 4)
(2. 4)
В качестве второго характерного значения псевдо -
частоты выберем ![]() , ей будет
соответствовать частота
, ей будет
соответствовать частота ![]() .
Для аналоговой системы получим:
.
Для аналоговой системы получим:
(2. 5)
Для дискретной системы найдем:
(2. 6.)
Определим погрешность дискретного преобразования, относительно «эталонного» аналогового:
(2.7.)
(2. 8.)
Итак, получили, что при больших частотах ошибка достигает 146%! Не стоит забывать, что большим частотам во временной области соответствует начальный участок переходного процесса.
(2. 9)
Итак, результаты вычисления погрешностей остаются прежними
![]()
Пример 3.Найдем спектры замкнутых систем с аналоговым интегратором, с дискретным интегратором "прямоугольниками с упреждением" и с интегратором "прямоугольниками" и экстраполятором нулевого порядка.
Для аналоговой структуры получим такой выход:
![]()
 (2. 10)
(2. 10)
Для первой дискретной САУ будем иметь:
![]()
![]()
![]() (2. 11.)
(2. 11.)
При ![]() , на основании
выражения (2.11) вычислим:
, на основании
выражения (2.11) вычислим:

Соответственно, относительные погрешности преобразований будут равны:
 (2. 12.)
(2. 12.)
Прежде чем выполнять вычисления по формуле (2. 12)
необходимо принять одно обязательное и второе желательное условия:
необходимо kVT![]() 2*),
желательно
2*),
желательно ![]() . При дальнейших расчетах принято:
. При дальнейших расчетах принято: ![]() .
.
Перейдем теперь к определению выражения для выхода второй дискретной САУ. Нетрудно убедиться, что получим вновь выражения (2.11.) и (2. 12).
Расчеты принесли таки результаты: 
Выводы
1. На основании решения трех примеров оценки расхождений информации в дискретных и аналоговых САУ разложением Лайнвиля (формула 1. 3.), можно установить, что методика решения таких задач имеет ряд специфических (я бы сказал малоизвестных и, практически, неизученных [С. К.])особенностей
2. Установлено, что оба метода "дискретного интегрирования" "прямоугольниками" имеют одинаковую погрешность по модулю. По-видимому, и "дифференцирование" "прямыми " и "обратными " разностями не дают различий в обработке информации.
3. Существенно различаются (численные значения) величины расхождений информации в разомкнутых (астатических) и замкнутых (статических) системах с интеграторами.
Оформил: Мокринский Д.О. 01.10.2009,скорректировала: Дзусова В.В. 25.09.2010.
____________________________________________________________________
*)Это условие будет пояснено в лекции 3 (С.К.)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.