






















Федеральное агентство по образованию
Рязанский государственный радиотехнический университет
Кафедра АИТУ
Курсовая работа по дисциплине:
«Автоматизация проектирования систем
и средств управления»
на тему:
«Нашлемная система в задаче
сопровождения объектов»
Выполнил:
ст. гр. 430
Проверил:
Оглавление
Нашлемная система в задаче сопровождения объектов. 3
Задание. 6
Исходные данные. 7
Задание 1. 8
1. Моделирование переходной характеристики приводов опорно‑поворотной платформы.. 8
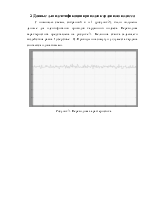
2. Данные для идентификации приводов карданного подвеса. 9
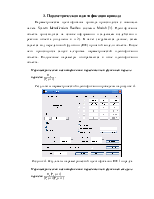
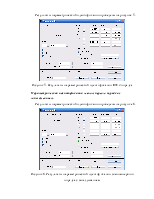
3. Параметрическая идентификация привода. 10
4. Модель системы сопровождения объектов. 14
5. Разработка аналогового корректирующего звена для приводов кардана системы сопровождения. 15
6. Разработка цифрового ПИД‑регулятора и цифровое корректирующее устройство на основе S‑функции. 16
7. Настройка замкнутого контура системы сопровождения. 21
8. Исследование работы системы сопровождения объектов для регуляторов с различными настройками. 22
9. Исследование влияния ограничения скорости поворота платформы на точность сопровождения. 26
10. Исследование влияния неточностей движения головы на точность сопровождения объектов. 30
Задание 2. 32
Заключение. 33
Библиографический список. 34
Нашлемная система в задаче сопровождения объектов
Для повышения точности сопровождения объектов, решения дополнительных задач в состав системы сопровождения (СС) объектов включают нашлемную информационно-управляющую систему. Функциональная схема улучшенной системы сопровождения объектов представлена на рисунке 1.
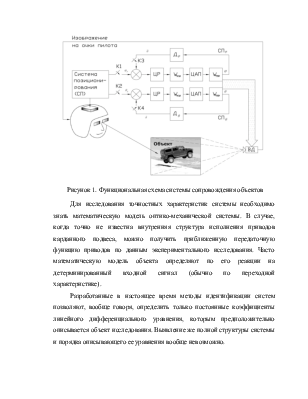
Функциональная схема включает в себя следующие основные компоненты:
1) опорно-поворотную платформу с приводами карданного
подвеса, выполняющими роль СС, которая представляет собой двухосную карданную
систему, жестко закрепленную на носителе. На внутренней рамке кардана СС
закрепляют видеодатчик (ВД), с помощью которого осуществляется обзор местности
– фоноцелевой обстановки. Приводы карданного подвеса управляют вращением
внешней и внутренней рамок карданного подвеса, обеспечивая необходимые угловые
скорости перемещения положение оптической оси ВД в пространстве. С осями
вращения связаны датчики углов поворота ![]() и
и ![]() , выдающие
результаты измерения углов в виде шестнадцатиразрядных двоичных кодов с
частотой
, выдающие
результаты измерения углов в виде шестнадцатиразрядных двоичных кодов с
частотой ![]() (ключи К3, К4).
(ключи К3, К4).
2) систему позиционирования (СП), назначение которой сводится
к измерению угловых перемещений шлема пилота (или его визирной линии) в системе
координат носителя. Результаты измерения φСП, θСП выдаются в цифровом двоичном
коде с частотой ![]() (ключи К1, К2).
(ключи К1, К2).
3) следящие приводы (![]() ,
,![]() ) положения для
отработки СС заданных углов поворота φР, θР, поступаемым из СП. При идеальной
отработке углов поворота следящими приводами у пилота должна создаваться
иллюзия осмотра фоноцелевой обстановки обычным зрением.
) положения для
отработки СС заданных углов поворота φР, θР, поступаемым из СП. При идеальной
отработке углов поворота следящими приводами у пилота должна создаваться
иллюзия осмотра фоноцелевой обстановки обычным зрением.
|
|||
|
Рисунок 1. Функциональная схема системы сопровождения объектов |
Для исследования точностных характеристик системы необходимо знать математическую модель оптико-механической системы. В случае, когда точно не известна внутренняя структура исполнения приводов карданного подвеса, можно получить приближенную передаточную функцию приводов по данным экспериментального исследования. Часто математическую модель объекта определяют по его реакции на детерминированный входной сигнал (обычно по переходной характеристике).
Разработанные в настоящее время методы идентификации систем позволяют, вообще говоря, определить только постоянные коэффициенты линейного дифференциального уравнения, которым предположительно описывается объект исследования. Выявление же полной структуры системы и порядка описывающего ее уравнения вообще невозможно.
Математическая модель приводов скорости оптико-механической системы может быть получена при помощи метода идентификации систем, основывающегося на аппроксимации переходных характеристик.
Задание
Задание 1. Построить систему управления приводами карданного подвеса. Передаточные функции приводов определить путем идентификации объектов по данным, приведенным ниже для каждого варианта задания при помощи System Identification Toolbox. Моделирование системы осуществить в Simulink. Провести исследование точности сопровождения объекта системой сопровождения.
Задание 2. Оформить рисунки и чертежи при помощи программы AutoCAD.
Исходные данные
|
Вариант № 4 |
Частота дискретизации датчиков СП Передаточная функция приводов кардана Направление на объект Максимальная скорость поворота рамок платформы Параметры неравномерности движения головы |
Задание 1
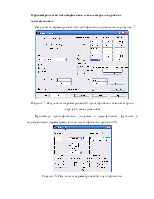
1. Моделирование переходной характеристики приводов опорно‑поворотной платформы
В соответствии с вариантом задания была собрана схема (рисунок
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.