Рис. 1.3. Сходимость коэффициентов оценки параметров системы, Т0=0,1
Таблица 1.2. Сходимость коэффициентов оценки параметров системы, Т0=0,1
|
с1 |
с2 |
с3 |
|
|
Теоретические |
-1,9913 |
0,9124 |
0,0402 |
|
Экспериментальные |
-1,8470 |
0,8941 |
0,0660 |
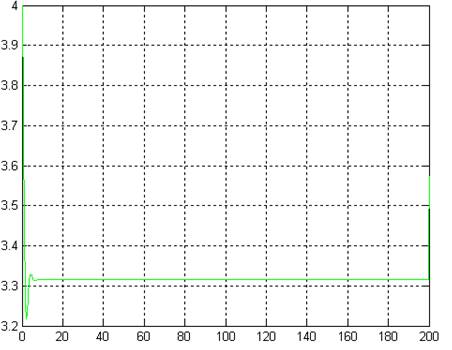
Рис. 1.4. Моделирование разомкнутой системы при отсутствии помех
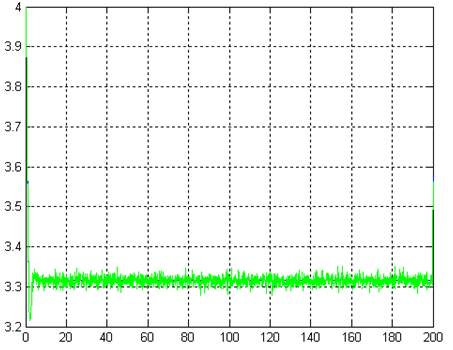
Рис. 1.5. Моделирование разомкнутой системы при наличии помех с дисперсией 0.01
Применение метода для замкнутой системы
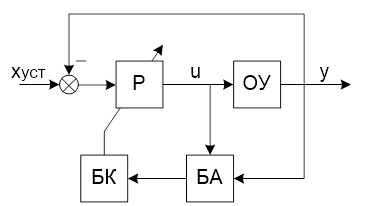
Рис. 1.6. Схема исследуемой замкнутой системы
Принцип функционирования:
1) По результатам измерения регулируемого параметра и величины его задания вычисляются коэффициенты алгоритма и новое значение вектора оценок коэффициентов объекта;
2) На основании полученных оценок в соответствии с ЛК-критерием оптимальности вычисляются оптимальные коэффициенты ПД-регулятора.
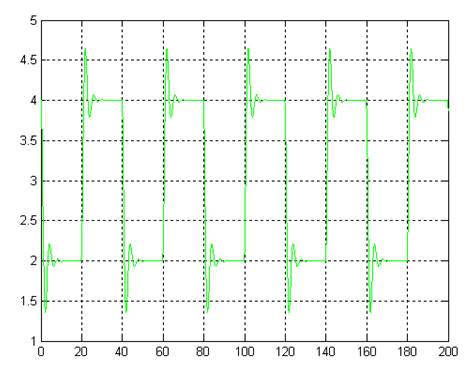
Рис. 1.7. Моделирование замкнутой системы при отсутствии помех
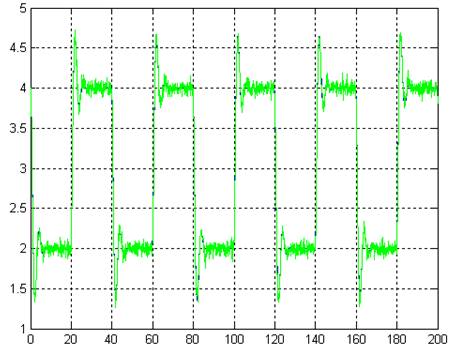
Рис. 1.8. Моделирование замкнутой системы при наличии помех с дисперсией 0.01
Вектор С = [1,9970 -0,9271 0,0183]Т – расчётное значение для T0 = 0,1 c.
Таблица 1.3. Результаты, Т0=0,1
|
Тип системы |
Шум |
РМНК |
|
Замкнутая |
0 |
С=[1.9694 -0.9845 0.0151]Т |
|
0,01 |
С=[1.9385 0.9524 0.0140]Т |
|
|
Разомкнутая |
0 |
С=[1,9124 -0,9317 0,0080]Т |
|
0,01 |
С=[1.8734 -0.8871 0.0073]Т |
2. Алгоритм Качмажа
Применение метода для разомкнутой системы (рис. 1.1).
r3.3.m
clear
T0 = 0.05;
N = 200;
A = [ 0 1; -5 –sqrt(5)/2 ];
B = [0;2];
for i=1:N
Tk(i) = i*T0;
end
sim('model2',Tk);
for i=1:N
yk(i) = Yk(i);
uk(i) = Uk(i);
Tk(i) = i*T0;
f(:,i)=[0;0;0];
Ck(:,i)=[0;0;0];
a1_ident(i)=0;
a2_ident(i)=0;
end
for k=3:N
f(:,k) = [yk(k-1); yk(k-2);uk(k)];
Ck(:,k)=Ck(:,k-1)+(yk(k)-Ck(:,k-1)'*f(:,k))/(f(:,k)'*f(:,k))*f(:,k);
a1_ident(k)=2*T0*(Ck(1,k)+2*Ck(2,k))/Ck(3,k);
a2_ident(k)=-2*(-1+Ck(2,k)+Ck(1,k))/Ck(3,k);
end
stairs(Tk,a1_ident,'r');
hold on
stairs(Tk,a2_ident,'g');
hold off
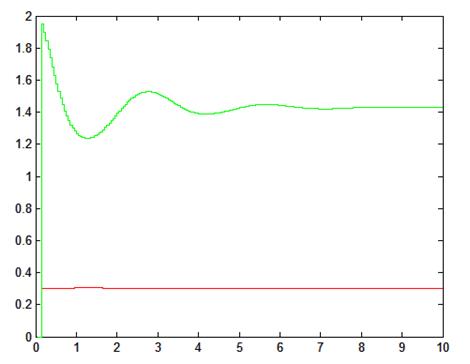
Рис. 2.1. Сходимость параметров системы, Т0=0,05
Таблица 2.1. Сходимость параметров системы, Т0=0,05
|
a1 |
a0 |
|
|
Теоретические |
0,707 |
2 |
|
Экспериментальные |
0,3007 |
1,4269 |
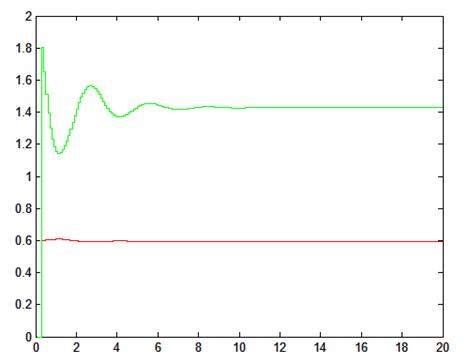
Рис. 2.2. Сходимость параметров системы, Т0=0,1
Таблица 2.2. Сходимость параметров системы, Т0=0,1
|
a1 |
a0 |
|
|
Теоретические |
0,707 |
2 |
|
Экспериментальные |
0,5948 |
1,4286 |
Вектор С = [1,9970 -0,9271 0,0183]Т – расчётное значение для T0 = 0,1 c.
Таблица 2.3. Результаты, Т0=0,1
|
Тип системы |
Шум |
Метод Качмажа |
|
Замкнутая |
0 |
С=[ 0.5074 0.5072 0.0245]Т |
|
0,01 |
С=[ 0.5066 0.5065 0.0220]Т |
|
|
Разомкнутая |
0 |
С=[ 1.9073 -0.9072 0.0208]Т |
|
0,01 |
С=[ 0.5058 0.5057 0.0225]Т |
Выводы
В ходе выполнения работы были исследованы алгоритмы идентификации, используемые при построении адаптивных систем. Использовались два метода:
- рекуррентный метод наименьших квадратов;
- алгоритм Качмажа.
По полученным результатам можно сказать, что РМНК приводит к правильному результату в случае замкнутой или разомкнутой системы при отсутствии и наличии помех.
Метод Качмажа не обеспечивает сходимость параметров системы в точку, так как ориентируется на косвенный критерий. Он приводит к правильному результату для данного объекта только в случае разомкнутой системы и отсутствии помех.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.