

























РАЗРАБОТКА МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ
Руководитель работы
Курсовая работа выполнена на
и студент допущен к защите
Руководитель работы _________________
“__” __________________ 2000 г.
При защите курсовая работа оценена на
Руководитель работы__________________
“__” __________________ 2000 г.
Гомель 2000
Введение |
3 |
|||
|
1Техническое задание на проектирование |
5 |
|||
|
1.1 |
Алгоритм работы МПС |
5 |
||
|
1.2 |
Обработка цифровой информации |
6 |
||
|
1.3 |
Обработка аналоговой информации |
6 |
||
|
1.4 |
Обработка запросов на прерывания |
8 |
||
|
1.5 |
Пульт управления |
8 |
||
|
1.6 |
Структура МПС |
9 |
||
|
2Разработка МПС |
11 |
|||
|
2.1 |
Разработка схемы центрального процессора |
11 |
||
|
2.2 |
Разработка схемы ПЗУ и ОЗУ |
22 |
||
|
2.3 |
Разработка подсистемы ввода –вывода |
24 |
||
|
3Разработка программного обеспечения МПС Заключение |
30 35 |
|||
Литература |
36 |
|||
Введение
Выполнение современных сложных технологических процессов невозможно осуществлять устаревшими примитивными техническими средствами.
До недавнего времени авангардными считались сложные механические системы с обратной связью. На следующих этапах развития появились элементы электротехники, как более быстрые и экономически выгодные.
Развитием этой тенденции являются управляющие устройства на аналоговой микроэлектронной базе с применением операционных усилителей, позволяющих реализовывать некоторые математические функции для осуществления технологического процесса. Качественно новые возможности предлагает микропроцессорная техника. Те же операции стало возможным реализовывать с большей точностью. Сложность и вложенность операций более не требовала больших затрат от разработчиков систем и от их заказчиков.
Применение цифровых элементов позволяет внедрять очень гибкие решения, известные прежде лишь математике. Значительно упрощается конструирование и настройка таких систем, т. к. существует множество стандартных решений, а цена элементной базы постоянно снижается.
Для реализации заданных функций управления технологическим процессом будем использовать популярную и уже устаревшую серию БИС КР580. В данной сери микросхем для этого есть все необходимые логические элементы. Параметры микросхем не критичны к поставленным задачам. А так как их сегодняшняя цена одна из минимально возможных, то есть смысл выбрать именно серию КР580.
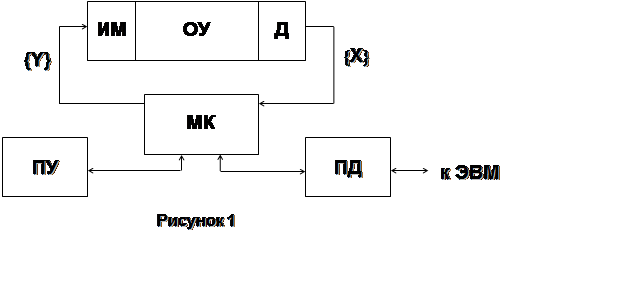 |
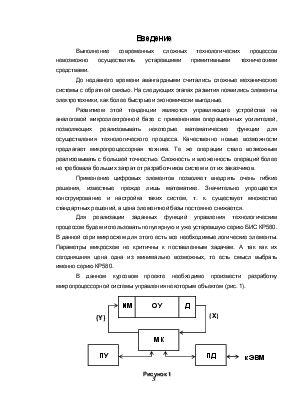
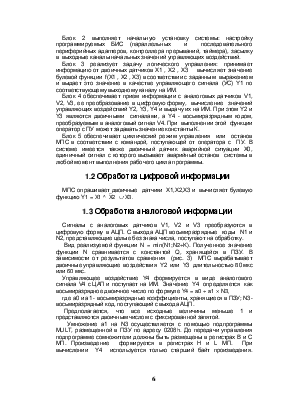
Микропроцессорная система (МПС) принимает информацию {X} об объекте управления (ОУ) от аналоговых и цифровых датчиков (Д), вырабатывает управляющие воздействия {Y} в соответствии с законом управления и подает их на исполнительные механизмы (ИМ). МПС состоит из микроконтроллера (МК) - управляющей микроЭВМ, и пульта управления (ПУ). С помощью ПУ оператор получает возможность управлять работой микроЭВМ: запускать ее и останавливать, выдавать значение некоторых уставок (констант), снимать с индикаторов информацию о состоянии объекта и т.п.
С помощью последовательного канала (ПК) связи МПС может передавать обработанную информацию ЭВМ более высокого уровня по ее запросу.
В курсовом проекте необходимо произвести разработку структурной схемы МПС, включая устройства связи с Д и ИМ, и программы, обеспечивающие выполнение алгоритма управления и алгоритма обмена, осуществить оценка характеристик МПС. Также необходимо произвести расчет числа аппаратурных затрат, выраженных в числе условных корпусов. Кроме того, рассчитать минимальное время выполнения рабочего цикла программы и необходимые информационные емкости оперативной и постоянной памяти.
1 Техническое задание на проектирование
Исходные данные
- для обработки цифровой информации функция
Y1= X1 ^ `X2 È X3
- для обработки аналоговой информации функция
N = min(N1;N2+K)
Для ввода и вывода аналоговой информации используются АЦП и ЦАП, их краткие характеристики приведены ниже.
Характеристики АЦП и ЦАП К572ПВ1:
Ø Разрядность –12;
Ø Преобразование–170 мкс;
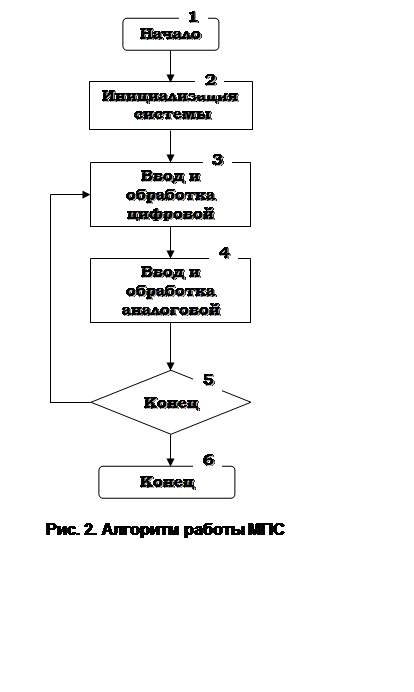 |
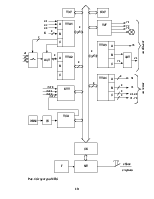
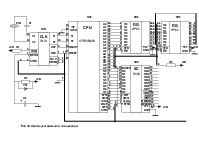
Блок 2 выполняет начальную установку системы: настройку программируемых БИС (параллельных и последовательного периферийных адаптеров, контроллера прерываний, таймера), засылку в выходные каналы начальных значений управляющих воздействий.
Блок 3 реализует задачу логического управления: принимает информацию от двоичных датчиков Х1 , X2 , X3 вычисляет значение булевой функции f(X1 , X2 , X3) в соответствии с заданным выражением и выдает это значение в качестве управляющего сигнала (УС) Y1 по соответствующему выходному каналу на ИМ.
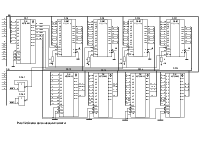
Блок 4 обеспечивает прием информации с аналоговых датчиков V1, V2, V3, ее преобразование в цифровую форму, вычисление значений управляющих воздействий Y2, Y3, Y4 и выдачу их на ИМ. При этом Y2 и Y3 являются двоичными сигналами, а Y4 - восьмиразрядным кодом, преобразуемым в аналоговый сигнал V4. При выполнении этой функции оператор с ПУ может задавать значение константы К.
Блок 5 обеспечивает циклический режим управления или останов МПС в соответствии с командой, поступающей от оператора с ПУ. В системе имеется также двоичный датчик аварийной ситуации X0, единичный сигнал с которого вызывает аварийный останов системы в любой момент выполнения рабочего цикла программы.
МПС опрашивает двоичные датчики X1,X2,X3 и вычисляет булевую функцию
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.