

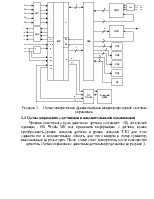




















Схема организации канала с последовательным доступом представлена на рисунке 8.
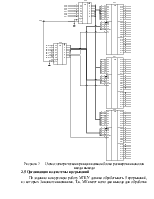
Рисунок 9 — Схема электрическая принципиальная канала с последовательным доступом
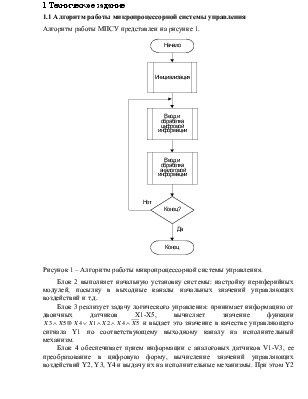
Рисунок 10 — Алгоритм инициализации
В блоке i1 настраиваются приоритеты прерываний, порядок их обработки, режим обмена последовательного порта, режимы работы таймеров, режимы работы линий ввода-вывода.
В блоке i2 инициализируются ППА.
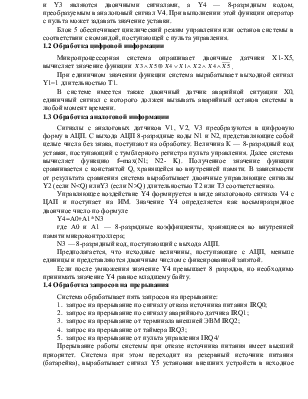
Рисунок 11 — Алгоритм обработки цифровой информации
В блоке d1 происходит побитовый ввод значений X1-X5 с одновременным вычислением значения функции f во флаге переноса.
Блок d2 проверяет значение функции f и если оно равно 0, то организуется обход блока d3.
В блоке d3 происходит выдача управляющего сигнала Y1 длительностью 925 мкс. Для этого необходимо рассчитать константу для загрузки в таймер. Константа будет равна
FFFFh – 298h = FD67h.
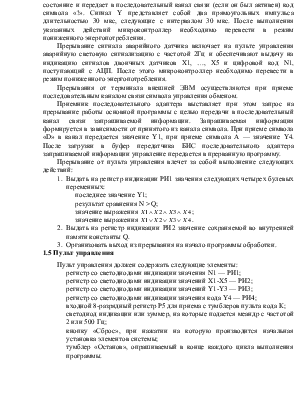
Рисунок 12 — Алгоритм обработки аналоговой информации
В блоке a1 происходит ввод кода N2 с АЦП и получение кода К с пульта управления.
В блоке a2 вычитается из N2 значение К, при отрицательном результате происходит передача управления на блок а5.
В блоке a3. вычисляется значение функции N = max(N1; N2-K)
В блоке a4 происходит выдача управляющего сигнала Y2 длительностью 768 мкс. Для этого необходимо рассчитать константу для загрузки в таймер. Константа будет равна
FFFFh –300h = FCFFh.
В блоке a5 происходит выдача управляющего сигнала Y3 длительностью 433 мкс. Для этого необходимо рассчитать константу для загрузки в таймер. Константа будет равна
FFFFh – 181h = FE4Eh.
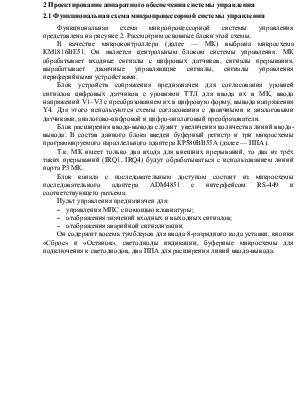
Рисунок 13 — Алгоритм обмена информацией по последовательному каналу связи
В блоке r1 осуществляется прием последовательным каналом связи символа.
В блоке r2 проверяется, является ли принятый символ символом D. Для этого из кода принятого символа вычитается код символа D и анализируется флаг переноса.
Если принятый символ является символом D, то управление передается на блок r4, иначе — на блок r3.
В блоке r4 в линию связи передается значение переменной, в которой хранится Y1.
В блоке r3 проверяется, является ли принятый символ символом А. Для этого из кода принятого символа вычитается код символа А и анализируется флаг переноса.
Если принятый символ является символом А, то в блоке r5 в линию связи передается значение переменной, в которой хранится Y4.
Рисунок 14 — Алгоритм обработки прерывания от БП
Рисунок 15 — Алгоритм обработки прерывания от аварийного датчика
Произведем расчет потребляемой мощности системы, для чего необходимо просуммировать мощности, потребляемые каждым из устройств системы.
Расчет потребляемой мощности по каналу + 5 В приведен в таблице 1. Расчет потребляемой мощности по каналу + 15 В таблице 2.
Таблица 1 — Расчет тока потребления по каналу + 5 В
|
Наименование |
Потребляемый ток, мА |
Кол-во |
Общий потребляемый ток, мА |
|
КМ1816ВЕ51 |
150 |
1 |
150 |
|
К555ИР22 |
20 |
2 |
40 |
|
КР580ВВ55А |
50 |
3 |
150 |
|
К555ЛА3 |
8 |
1 |
8 |
|
К555ЛП14 |
8 |
6 |
48 |
|
ADM4851 |
2 |
1 |
2 |
|
AD7822 |
16 |
1 |
16 |
|
AD557 |
18 |
1 |
18 |
|
Итого: |
432 |
||
Потребляемая мощность по каналу +5В составит 5·0,432 = 2,16 Вт.
Таблица 2 — Расчет тока потребления по каналу +15 В
|
Наименование |
Потребляемый ток, мА |
Кол-во |
Общий потребляемый ток, мА |
|
К140УД17 |
5 |
5 |
25 |
Потребляемая мощность по каналу +15В составит 15·0,025 = 0,375 Вт.
Общая потребляемая мощность составит
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.