Министерство высшего и среднего профессионального образования Российской Федерации
Санкт-Петербургский Государственный Технологический Университет Растительных Полимеров
Кафедра автоматизированного электропривода и электротехники
Курсовая работа по курсу "Цифровые системы управления”.
Выполнил: студент группы 533
Проверил .
Санкт-Петербург
2000
Задание:
2. Рассчитать цифровой регулятор для контура скорости и заменить им ранее рассчитанный аналоговый регулятор скорости.
3. Провести анализ системы с цифровым регулятором скорости при различных периодах квантования.
Данные:
Номинальное напряжение: Uн= 400(В)
Мощность: Pн= 50(кВт)
Коэффициент полезного действия: hн= 90%
Скорость вращения: n= 1000(об/мин)
Берём заранее рассчитанный, по ранее упомянутым данным, и настроенный контур тока.
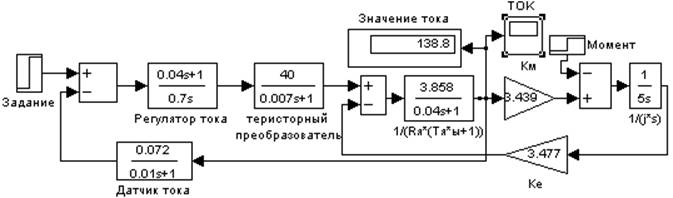
Рис 1. Структурная схема контура тока.
Настройка контура скорости.
Выбор параметров регулятора производился в среде Mat lab 5.2 Simulince. ПИ-регулятор, при настройке контура скорости на симметричный оптимум, был представлен в виде параллельно включённых пропорционального и интегрального звеньев. Сначала настраиваем коэффициент усиления пропорционального звена, путем постепенного увеличения коэффициента усиления до критического состояния системы. Затем берём половину от критического значения коэффициента усиления. Далее настраиваем коэффициент усиления интегрального звена, до получения заданного значения перерегулирования, в нашем случае d= 43%.

Рис 2. Структурная схема контура скорости.
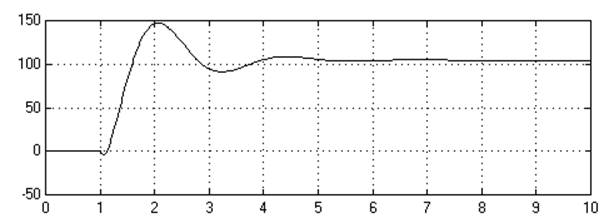
Рис 3. Вид переходной функции h(t).
![]()
Расчёт цифрового регулятора.
В среде Mat lab 5.2 делаем z-преобразование передаточной функции аналогового ПИ-регулятора скорости, при заданном периоде квантования.
Имеем передаточную функцию: ![]() ;
;
После z-преобразования имеем: ![]() ; при Ткв
= 0,01 (сек)
; при Ткв
= 0,01 (сек)
Теперь подставляем полученную передаточную функцию в структурную схему.
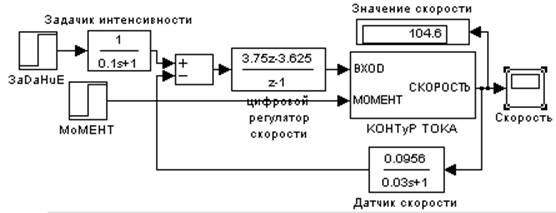
Рис 4. Структурная схема контура скорости с цифровым регулятором.
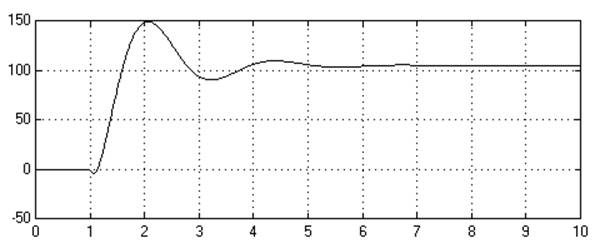
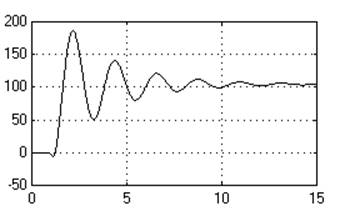
Рис 5. График переходного процесса скорости.
Как видно из графика вид переходной функции не изменился. Это значит, что выбранный период квантования правилен.
Анализ системы с цифровым регулятором.
Из теории ДСАУ известно, что при различных значениях периода квантования характеристики системы, такие как: устойчивость, точность, быстродействие, будут изменятся. Для того, чтобы проверить это поставим в наш ранее настроенный контур скорости цифровой регулятор, но с различными периодами квантования. возьмём три значения: Tкв1= 0,09 (сек), Ткв2=0,15 (сек), Ткв3 =0,3 (сек). Графики переходных функций смотрите ниже.
Эксперимент 1: Эксперимент 2:
![]() ;
;
![]() ;
;
При Ткв1=0,09 (сек) При Ткв2= 0,15 (сек)

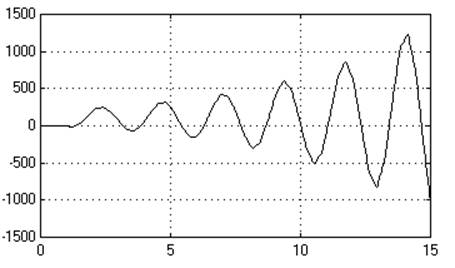 Эксперимент 3:
Эксперимент 3:
![]() ;
;
При Ткв3=0,3 (сек).
Из проведённых экспериментов видно, что при увеличении значения Ткв система изменяет свои характеристики. Причём, значение периода квантования равное 0,3 (сек) является критическим, так как при любых значениях Ткв больших 0,3 (сек) система становится не устойчивой. Провиденные выше эксперименты полностью подтверждают теоретические положения ДСАУ. Значит, можно сделать вывод, что выбор значения периода квантования очень важен при настройке цифровых систем.
Составление алгоритма работы цифрового регулятора.
Для составления алгоритма работы берем ранее полученную передаточную функцию цифрового регулятора и приводим ее к нужному виду.
![]() ;
;
Получив передаточную функцию цифрового регулятора в нужном виде, вспоминаем, что передаточная функция звена есть отношение значения сигнала с выхода звена к значению сигнала входа звена. Тогда, запишем равенство:
![]() ;
;
Из полученного равенства выражаем Y(z):
![]() ;
;
В итоге получили алгоритм работы цифрового регулятора. Теперь осталось только представить алгоритм работы цифрового регулятора в более понятном виде для программиста, то есть:
Y(n) = Y[n-1]+3.75×X[n]-3.625×X[n-1] ;
Где n- шаг программы.
Для того, чтобы котроллер начал работать по данному алгоритму осталось описать данный алгоритм на понятном для контроллера программном языке, что не заставит не какого труда для хорошо знающего своё дело программиста.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

