


























Санкт-Петербургский Государственный Технологический
Университет Растительных Полимеров
Лабораторная работа N1
“Расчет и исследование на ЭВМ в диалоговом режиме цифровой системы автоматического регулирования концентрации бумажной массы по заданным критериям качества”
(Вариант 2.2)
.
Выполнили: Н ,
гр.544
Проверила:
Санкт-Петербург
2007г
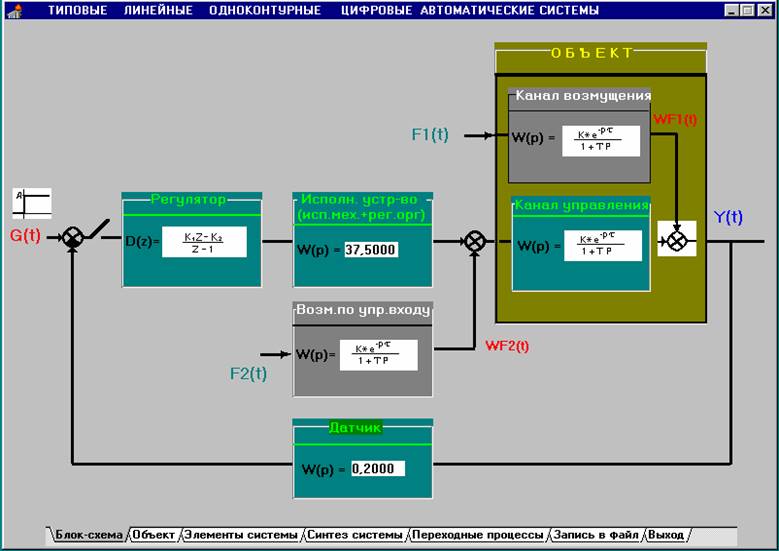
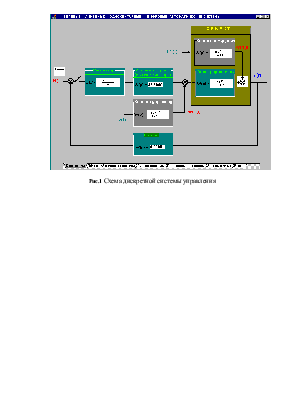
Рис.1 Схема дискретной системы управления
Целью первой лабораторной работы: является изучение структуры и возможностей стандартного программного обеспечения (ASIM) решения ряда вопросов синтеза и анализа линейных одноконтурных дискретных систем регулирования, использующих амплитудно-импульсную модуляцию сигналов.
Оценка качества систем управления.
1. Оценка точности:
Задача работы системы управления заключается в том, чтобы в любой момент времени Δy(t)=Δg(t).
Но это равенство нарушается вследствие наличия в системе статической ошибки ΔE(t).
Для нахождения конечного значения статической ошибки и для канала управления ,и для канала возмущения используем формулу:
ΔE∞= Δg∞-Δy∞ , где Δg∞-изменение задающего воздействия;
Δy∞-новое установившееся значение.
2. Запас устойчивости системы управления:
Запас устойчивости определяет степень удаленности системы от колебательной границы.
По каналу управления:
Перерегулирование:
Δyмах- Δy∞
![]() σ = [%] , где Δyмах- максимальное значение;
σ = [%] , где Δyмах- максимальное значение;
Δy∞ Δy∞- новое установившееся состояние.
Затухание за период: у1мах - у2мах
![]() ξ=
[%] , где y1мах-первое
максимальное значение;
ξ=
[%] , где y1мах-первое
максимальное значение;
у1мах y2мах- второе максимальное значение;
3 Быстродействие:
По каналу управления:
Быстродействие системы определяется временем от момента подачи входного воздействия до момента, когда регулируемая величина будет равна заданному значению. Теоретически это время равно бесконечности. Поэтому время прекращения движения необходимо выбрать до момента, когда отклонение выходной величины от ее нового установившегося значения станет меньше некоторой определенной малой величины (Δ=3-5% от Δy∞).
Δ=׀Δy∞- Δy(t) ׀=5 % от Δy∞.
Все рассчитанные оценки представим в виде таблиц (табл.1,табл.2).
РЕЗУЛЬТАТЫ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ
ОДНОКОНТУРНОЙ ЦИФРОВОЙ АВТОМАТИЧЕСКОЙ СИСТЕМЫ
21.02.06
********************************************************************
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ОБЪЕКТА ПО КАНАЛУ УПРАВЛЕНИЯ:
K * Exp(-Tau*P)
W(P) = ----------------- .
1 + T*P
ПАРАМЕТРЫ МОДЕЛИ ОБЪЕКТА :
Коэффициент передачи K = -0.015
Постоянная времени T = 70.000
Запаздывание Tau = 10.000
********************************************************************
ПАРАМЕТРЫ ЭЛЕМЕНТОВ СИСТЕМЫ :
Коэффициент передачи датчика 0.200
Коэффициент передачи испол.устройства 37.500
ДИСКРЕТНОСТЬ РАБОТЫ СИСТЕМЫ 5.000
********************************************************************
РАСЧЕТ ОБЛАСТИ УСТОЙЧИВОСТИ
( ЛИНИИ РАВНОГО ЗАПАСА УСТОЙЧИВОСТИ )
ЛИНЕЙНОЙ ЦИФРОВОЙ СИСТЕМЫ
********************************************************************
ОБЛАСТЬ УСТОЙЧИВОСТИ В ПЛОСКОСТИ К1 и К2
О П Р Е Д Е Л Я Е Т С Я СЛЕДУЮЩИМ ОБРАЗОМ :
АПЕРИОДИЧЕСКАЯ ГРАНИЦА ЗАДАЕТСЯ В ВИДЕ НЕРАВЕНСТВА K1 < K2
КОЛЕБАТЕЛЬНАЯ ГРАНИЦА ЗАДАЕТСЯ В ВИДЕ ТАБЛИЦЫ ЗНАЧЕНИЙ
---------------------------------------K1 ¦ K2
----------------------------------------3.14997 ¦ 0.93210
-6.91824 ¦ -1.64370
-11.09289 ¦ -4.55070
-15.62344 ¦ -7.77444
-20.45450 ¦ -11.29880
-25.52624 ¦ -15.10605
-30.77490 ¦ -19.17688
-36.13338 ¦ -23.49053
-41.53173 ¦ -28.02478
-46.89787 ¦ -32.75609
-52.15813 ¦ -37.65961
-57.23798 ¦ -42.70931
-62.06263 ¦ -47.87803
-66.55774 ¦ -53.13759
-70.65011 ¦ -58.45887
-74.26833 ¦ -63.81191
-77.34348 ¦ -69.16598
-79.80978 ¦ -74.48974
-81.60526 ¦ -79.75126
---------------------------------------********************************************************************
СТЕПЕНЬ КОЛЕБАТЕЛЬНОСТИ M = 0.90
ЛИНИЯ РАВНОГО ЗАПАСА УСТОЙЧИВОСТИ ЗАДАЕТСЯ В ВИДЕ ТАБЛИЦЫ
---------------------------------------K1 | K2
----------------------------------------3.60993 | -3.05469
-7.71253 | -6.75500
-11.46583 | -10.05740
-14.85682 | -12.98042
-17.87672 | -15.54321
-20.52063 | -17.76530
-22.78722 | -19.66642
-24.67845 | -21.26632
-26.19919 | -22.58462
-27.35702 | -23.64071
-28.16183 | -24.45361
-28.62564 | -25.04190
-28.76228 | -25.42361
-28.58713 | -25.61620
-28.11690 | -25.63648
-27.36941 | -25.50060
-26.36333 | -25.22396
-25.11801 | -24.82126
---------------------------------------********************************************************************
РЕКОМЕНДУЕМЫЕ ПАРАМЕТРЫ РЕГУЛЯТОРА :
------------------------------НАСТРОЙКА - K1 = -28.7628
НАСТРОЙКА - K2 = -25.4146
------------------------------********************************************************************
********************************************************************
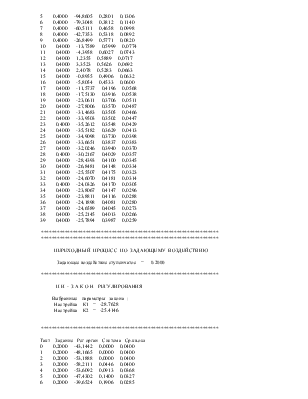
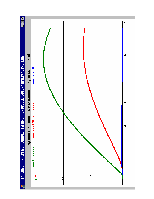
ПЕРЕХОДНЫЙ ПРОЦЕСС ПО ЗАДАЮЩЕМУ ВОЗДЕЙСТВИЮ
Задающее воздействие ступенчатое = 0.4000
********************************************************************
П И - З А К О Н РЕГУЛИРОВАНИЯ
Выбранные параметры закона :
Настройка К1 = -28.7628
Настройка К2 = -25.4146
********************************************************************
Такт Задание Рег орган Система Ср.кв.ош
0 0,4000 -86,2884 0,0000 0,1600
1 0,4000 -96,3330 0,0000 0,1600
2 0,4000 -106,3776 0,0000 0,1600
3 0,4000 -116,4221 0,0892 0,1600
4 0,4000 -107,2185 0,1827 0,1473
5 0,4000 -94,8605 0,2801 0,1306
6 0,4000 -79,3048 0,3812 0,1140
7 0,4000 -60,5111 0,4658 0,0998
8 0,4000 -42,7353 0,5318 0,0892
9 0,4000 -26,8499 0,5771 0,0820
10 0,4000 -13,7589 0,5999 0,0774
11 0,4000 -4,3958 0,6027 0,0743
12 0,4000 1,2355 0,5889 0,0717
13 0,4000 3,3523 0,5626 0,0692
14 0,4000 2,4078 0,5283 0,0663
15 0,4000 -0,8955 0,4906 0,0632
16 0,4000 -5,8054 0,4533 0,0600
17 0,4000 -11,5737 0,4196 0,0568
18 0,4000 -17,5130 0,3916 0,0538
19 0,4000 -23,0611 0,3706 0,0511
20 0,4000 -27,8006 0,3570 0,0487
21 0,4000 -31,4683 0,3505 0,0466
22 0,4000 -33,9503 0,3502 0,0447
23 0,4000 -35,2612 0,3548 0,0429
24 0,4000 -35,5182 0,3629 0,0413
25 0,4000 -34,9098 0,3730 0,0398
26 0,4000 -33,6651 0,3837 0,0383
27 0,4000 -32,0246 0,3940 0,0370
28 0,4000 -30,2167 0,4029 0,0357
29 0,4000 -28,4393 0,4100 0,0345
30 0,4000 -26,8481 0,4148 0,0334
31 0,4000 -25,5507 0,4175 0,0323
32 0,4000 -24,6070 0,4181 0,0314
33 0,4000 -24,0326 0,4170 0,0305
34 0,4000 -23,8067 0,4147 0,0296
35 0,4000 -23,8811 0,4116 0,0288
36 0,4000 -24,1898 0,4081 0,0280
37 0,4000 -24,6589 0,4045 0,0273
38 0,4000 -25,2145 0,4013 0,0266
39 0,4000 -25,7894 0,3987 0,0259
********************************************************************
********************************************************************
ПЕРЕХОДНЫЙ ПРОЦЕСС ПО ЗАДАЮЩЕМУ ВОЗДЕЙСТВИЮ
Задающее воздействие ступенчатое = 0.2000
********************************************************************
П И - З А К О Н РЕГУЛИРОВАНИЯ
Выбранные параметры закона :
Настройка К1 = -28.7628
Настройка К2 = -25.4146
********************************************************************
Такт Задание Рег орган Система Ср.кв.ош
0 0,2000 -43,1442 0,0000 0,0400
1 0,2000 -48,1665 0,0000 0,0400
2 0,2000 -53,1888 0,0000 0,0400
3 0,2000 -58,2111 0,0446 0,0400
4 0,2000 -53,6092 0,0913 0,0368
5 0,2000 -47,4302 0,1400 0,0327
6 0,2000 -39,6524 0,1906 0,0285
7 0,2000 -30,2555 0,2329 0,0250
8 0,2000 -21,3676 0,2659 0,0223
9 0,2000 -13,4250 0,2885 0,0205
10 0,2000 -6,8795 0,2999 0,0194
11 0,2000 -2,1979 0,3014 0,0186
12 0,2000 0,6178 0,2945 0,0179
13 0,2000 1,6762 0,2813 0,0173
14 0,2000 1,2039 0,2642 0,0166
15 0,2000 -0,4477 0,2453 0,0158
16 0,2000 -2,9027 0,2267 0,0150
17 0,2000 -5,7868 0,2098 0,0142
18 0,2000 -8,7565 0,1958 0,0135
19 0,2000 -11,5305 0,1853 0,0128
20 0,2000 -13,9003 0,1785 0,0122
21 0,2000 -15,7342 0,1753 0,0117
22 0,2000 -16,9751 0,1751 0,0112
23 0,2000 -17,6306 0,1774 0,0107
24 0,2000 -17,7591 0,1814 0,0103
25 0,2000 -17,4549 0,1865 0,0099
26 0,2000 -16,8326 0,1919 0,0096
27 0,2000 -16,0123 0,1970 0,0092
28 0,2000 -15,1084 0,2015 0,0089
29 0,2000 -14,2197 0,2050 0,0086
30 0,2000 -13,4240 0,2074 0,0083
31 0,2000 -12,7754 0,2087 0,0081
32 0,2000 -12,3035 0,2091 0,0078
33 0,2000 -12,0163 0,2085 0,0076
34 0,2000 -11,9033 0,2074 0,0074
35 0,2000 -11,9405 0,2058 0,0072
36 0,2000 -12,0949 0,2040 0,0070
37 0,2000 -12,3295 0,2023 0,0068
38 0,2000 -12,6072 0,2007 0,0066
39 0,2000 -12,8947 0,1993 0,0065
********************************************************************
********************************************************************
ПЕРЕХОДНЫЙ ПРОЦЕСС ПО ЗАДАЮЩЕМУ ВОЗДЕЙСТВИЮ
Задающее воздействие ступенчатое = 0.6000
********************************************************************
П И - З А К О Н РЕГУЛИРОВАНИЯ
Выбранные параметры закона :
Настройка К1 = -28.7628
Настройка К2 = -25.4146
********************************************************************
Такт Задание Рег орган Система Ср.кв.ош
0 0,6000 -129,4327 0,0000 0,3600
1 0,6000 -144,4995 0,0000 0,3600
2 0,6000 -159,5663 0,0000 0,3600
3 0,6000 -174,6332 0,1338 0,3600
4 0,6000 -160,8277 0,2740 0,3315
5 0,6000 -142,2907 0,4201 0,2939
6 0,6000 -118,9572 0,5718 0,2566
7 0,6000 -90,7666 0,6987 0,2246
8 0,6000 -64,1029 0,7976 0,2007
9 0,6000 -40,2749 0,8656 0,1845
10 0,6000 -20,6384 0,8998 0,1742
11 0,6000 -6,5937 0,9041 0,1672
12 0,6000 1,8533 0,8834 0,1614
13 0,6000 5,0285 0,8438 0,1556
14 0,6000 3,6116 0,7925 0,1492
15 0,6000 -1,3432 0,7359 0,1422
16 0,6000 -8,7082 0,6800 0,1349
17 0,6000 -17,3605 0,6294 0,1278
18 0,6000 -26,2695 0,5874 0,1211
19 0,6000 -34,5916 0,5559 0,1151
20 0,6000 -41,7008 0,5355 0,1097
21 0,6000 -47,2025 0,5258 0,1049
22 0,6000 -50,9254 0,5253 0,1006
23 0,6000 -52,8918 0,5322 0,0966
24 0,6000 -53,2773 0,5443 0,0929
25 0,6000 -52,3648 0,5595 0,0895
26 0,6000 -50,4977 0,5756 0,0862
27 0,6000 -48,0369 0,5910 0,0832
28 0,6000 -45,3251 0,6044 0,0803
29 0,6000 -42,6590 0,6150 0,0776
30 0,6000 -40,2721 0,6222 0,0751
31 0,6000 -38,3261 0,6262 0,0728
32 0,6000 -36,9104 0,6272 0,0706
33 0,6000 -36,0488 0,6256 0,0685
34 0,6000 -35,7100 0,6221 0,0666
35 0,6000 -35,8216 0,6174 0,0648
36 0,6000 -36,2847 0,6121 0,0630
37 0,6000 -36,9884 0,6068 0,0614
38 0,6000 -37,8217 0,6020 0,0598
39 0,6000 -38,6840 0,5980 0,0583
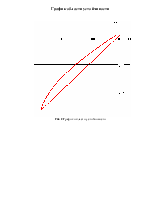
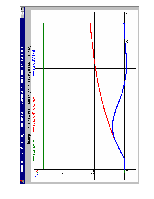
График области устойчивости
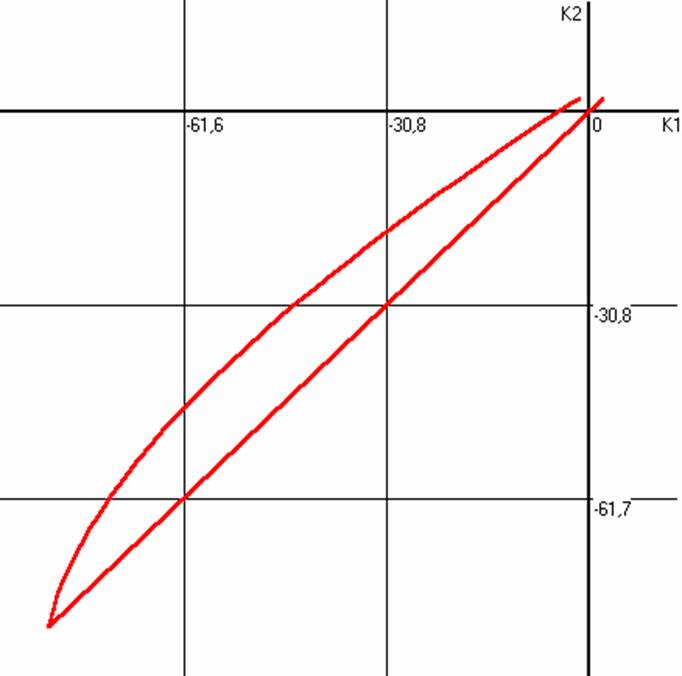
Рис. 2 График области устойчивости
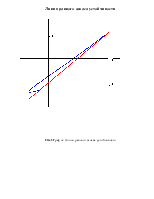
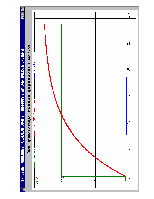
Линия равного запаса устойчивости
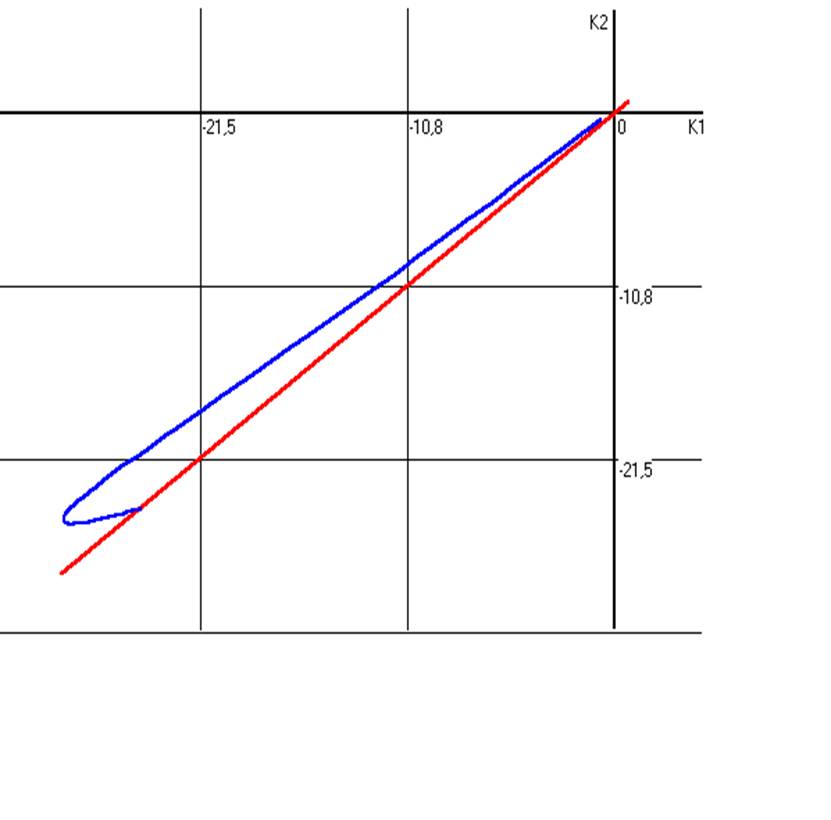
Рис.3 График Линии равного запаса устойчивости
РЕЗУЛЬТАТЫ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ
ОДНОКОНТУРНОЙ ЦИФРОВОЙ АВТОМАТИЧЕСКОЙ СИСТЕМЫ
28.02.06
********************************************************************
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ОБЪЕКТА ПО КАНАЛУ УПРАВЛЕНИЯ :
K * Exp(-Tau*P)
W(P) = ----------------- .
1 + T*P
ПАРАМЕТРЫ МОДЕЛИ ОБЪЕКТА :
Коэффициент передачи K = -0.015
Постоянная времени T = 70.000
Запаздывание Tau = 10.000
********************************************************************
ПАРАМЕТРЫ ЭЛЕМЕНТОВ СИСТЕМЫ :
Коэффициент передачи датчика 0.200
Коэффициент передачи испол.устройства 37.500
ДИСКРЕТНОСТЬ РАБОТЫ СИСТЕМЫ 5.000
********************************************************************
РАСЧЕТ ОБЛАСТИ УСТОЙЧИВОСТИ
( ЛИНИИ РАВНОГО ЗАПАСА УСТОЙЧИВОСТИ )
ЛИНЕЙНОЙ ЦИФРОВОЙ СИСТЕМЫ
********************************************************************
ОБЛАСТЬ УСТОЙЧИВОСТИ В ПЛОСКОСТИ К1 и К2
О П Р Е Д Е Л Я Е Т С Я СЛЕДУЮЩИМ ОБРАЗОМ :
АПЕРИОДИЧЕСКАЯ ГРАНИЦА ЗАДАЕТСЯ В ВИДЕ НЕРАВЕНСТВА K1 < K2
КОЛЕБАТЕЛЬНАЯ ГРАНИЦА ЗАДАЕТСЯ В ВИДЕ ТАБЛИЦЫ ЗНАЧЕНИЙ
---------------------------------------K1 ¦ K2
----------------------------------------3.14997 ¦ 0.93210
-6.91824 ¦ -1.64370
-11.09289 ¦ -4.55070
-15.62344 ¦ -7.77444
-20.45450 ¦ -11.29880
-25.52624 ¦ -15.10605
-30.77490 ¦ -19.17688
-36.13338 ¦ -23.49053
-41.53173 ¦ -28.02478
-46.89787 ¦ -32.75609
-52.15813 ¦ -37.65961
-57.23798 ¦ -42.70931
-62.06263 ¦ -47.87803
-66.55774 ¦ -53.13759
-70.65011 ¦ -58.45887
-74.26833 ¦ -63.81191
-77.34348 ¦ -69.16598
-79.80978 ¦ -74.48974
-81.60526 ¦ -79.75126
---------------------------------------********************************************************************
СТЕПЕНЬ КОЛЕБАТЕЛЬНОСТИ M = 0.90
ЛИНИЯ РАВНОГО ЗАПАСА УСТОЙЧИВОСТИ ЗАДАЕТСЯ В ВИДЕ ТАБЛИЦЫ
---------------------------------------K1 | K2
----------------------------------------3.60993 | -3.05469
-7.71253 | -6.75500
-11.46583 | -10.05740
-14.85682 | -12.98042
-17.87672 | -15.54321
-20.52063 | -17.76530
-22.78722 | -19.66642
-24.67845 | -21.26632
-26.19919 | -22.58462
-27.35702 | -23.64071
-28.16183 | -24.45361
-28.62564 | -25.04190
-28.76228 | -25.42361
-28.58713 | -25.61620
-28.11690 | -25.63648
-27.36941 | -25.50060
-26.36333 | -25.22396
-25.11801 | -24.82126
---------------------------------------********************************************************************
РЕКОМЕНДУЕМЫЕ ПАРАМЕТРЫ РЕГУЛЯТОРА :
------------------------------НАСТРОЙКА - K1 = -28.7628
НАСТРОЙКА - K2 = -25.4146
------------------------------********************************************************************
********************************************************************
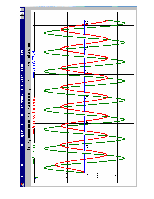
ПЕРЕХОДНЫЙ ПРОЦЕСС ПО ЗАДАЮЩЕМУ ВОЗДЕЙСТВИЮ
Задающее воздействие ступенчатое = 0.4000
П И - З А К О Н РЕГУЛИРОВАНИЯ
Выбранные параметры закона :
Настройка К1 = -28.7628
Настройка К2 = -25.4146
********************************************************************
Такт Задание Рег орган Система Ср.кв.ош
0 0,4000 -86,2884 0,0000 0,1600
1 0,4000 -96,3330 0,0000 0,1600
2 0,4000 -106,3776 0,0000 0,1600
3 0,4000 -116,4221 0,0892 0,1600
4 0,4000 -107,2185 0,1827 0,1473
5 0,4000 -94,8605 0,2801 0,1306
6 0,4000 -79,3048 0,3812 0,1140
7 0,4000 -60,5111 0,4658 0,0998
8 0,4000 -42,7353 0,5318 0,0892
9 0,4000 -26,8499 0,5771 0,0820
10 0,4000 -13,7589 0,5999 0,0774
11 0,4000 -4,3958 0,6027 0,0743
12 0,4000 1,2355 0,5889 0,0717
13 0,4000 3,3523 0,5626 0,0692
14 0,4000 2,4078 0,5283 0,0663
15 0,4000 -0,8955 0,4906 0,0632
16 0,4000 -5,8054 0,4533 0,0600
17 0,4000 -11,5737 0,4196 0,0568
18 0,4000 -17,5130 0,3916 0,0538
19 0,4000 -23,0611 0,3706 0,0511
20 0,4000 -27,8006 0,3570 0,0487
21 0,4000 -31,4683 0,3505 0,0466
22 0,4000 -33,9503 0,3502 0,0447
23 0,4000 -35,2612 0,3548 0,0429
24 0,4000 -35,5182 0,3629 0,0413
25 0,4000 -34,9098 0,3730 0,0398
26 0,4000 -33,6651 0,3837 0,0383
27 0,4000 -32,0246 0,3940 0,0370
28 0,4000 -30,2167 0,4029 0,0357
29 0,4000 -28,4393 0,4100 0,0345
30 0,4000 -26,8481 0,4148 0,0334
31 0,4000 -25,5507 0,4175 0,0323
32 0,4000 -24,6070 0,4181 0,0314
33 0,4000 -24,0326 0,4170 0,0305
34 0,4000 -23,8067 0,4147 0,0296
35 0,4000 -23,8811 0,4116 0,0288
36 0,4000 -24,1898 0,4081 0,0280
37 0,4000 -24,6589 0,4045 0,0273
38 0,4000 -25,2145 0,4013 0,0266
39 0,4000 -25,7894 0,3987 0,0259
П И - З А К О Н РЕГУЛИРОВАНИЯ
Выбранные параметры закона :
Настройка К1 = -27.1331
Настройка К2 = -25.3891
********************************************************************
Такт Задание Рег орган Система Ср.кв.ош
0 0,4000 -81,3994 0,0000 0,1600
1 0,4000 -86,6315 0,0000 0,1600
2 0,4000 -91,8636 0,0000 0,1600
3 0,4000 -97,0957 0,0842 0,1600
4 0,4000 -85,1989 0,1680 0,1479
5 0,4000 -72,2810 0,2514 0,1323
6 0,4000 -58,3416 0,3344 0,1165
7 0,4000 -43,3803 0,3995 0,1025
8 0,4000 -31,0012 0,4467 0,0911
9 0,4000 -21,4021 0,4762 0,0822
10 0,4000 -14,7811 0,4883 0,0753
11 0,4000 -11,3363 0,4867 0,0696
12 0,4000 -10,5079 0,4752 0,0649
13 0,4000 -11,6979 0,4578 0,0606
14 0,4000 -14,2703 0,4379 0,0568
15 0,4000 -17,5511 0,4186 0,0534
16 0,4000 -20,9873 0,4018 0,0502
17 0,4000 -24,1548 0,3889 0,0474
18 0,4000 -26,7651 0,3802 0,0450
19 0,4000 -28,6728 0,3757 0,0427
20 0,4000 -29,8491 0,3748 0,0407
21 0,4000 -30,3547 0,3766 0,0389
22 0,4000 -30,3100 0,3803 0,0372
23 0,4000 -29,8657 0,3850 0,0357
24 0,4000 -29,1774 0,3898 0,0343
25 0,4000 -28,3871 0,3943 0,0330
26 0,4000 -27,6108 0,3980 0,0317
27 0,4000 -26,9322 0,4007 0,0306
28 0,4000 -26,4019 0,4025 0,0296
29 0,4000 -26,0406 0,4033 0,0286
********************************************************************
П И - З А К О Н РЕГУЛИРОВАНИЯ
Выбранные параметры закона :
Настройка К1 = -27.4949
Настройка К2 = -23.7577
********************************************************************
Такт Задание Рег орган Система Ср.кв.ош
0 0,4000 -82,4847 0,0000 0,1600
1 0,4000 -93,6964 0,0000 0,1600
2 0,4000 -104,9081 0,0000 0,1600
3 0,4000 -116,1198 0,0853 0,1600
4 0,4000 -109,7429 0,1763 0,1478
5 0,4000 -99,7970 0,2726 0,1315
6 0,4000 -86,2032 0,3739 0,1150
7 0,4000 -68,8881 0,4616 0,1007
8 0,4000 -51,5338 0,5330 0,0900
9 0,4000 -35,0887 0,5854 0,0827
10 0,4000 -20,5564 0,6163 0,0783
11 0,4000 -8,9925 0,6271 0,0757
12 0,4000 -0,7026 0,6201 0,0739
13 0,4000 4,2299 0,5986 0,0720
14 0,4000 5,9677 0,5667 0,0699
15 0,4000 4,9427 0,5283 0,0672
16 0,4000 1,7085 0,4875 0,0643
17 0,4000 -3,1071 0,4477 0,0611
18 0,4000 -8,8568 0,4118 0,0580
19 0,4000 -14,9375 0,3816 0,0551
20 0,4000 -20,8254 0,3585 0,0525
21 0,4000 -26,1031 0,3430 0,0502
22 0,4000 -30,4737 0,3348 0,0482
23 0,4000 -33,7626 0,3332 0,0463
24 0,4000 -35,9092 0,3372 0,0447
25 0,4000 -36,9518 0,3455 0,0431
26 0,4000 -37,0068 0,3566 0,0416
27 0,4000 -36,2464 0,3692 0,0402
28 0,4000 -34,8751 0,3819 0,0388
29 0,4000 -33,1080 0,3939 0,0375
30 0,4000 -31,1530 0,4042 0,0363
31 0,4000 -29,1951 0,4124 0,0352
32 0,4000 -27,3870 0,4182 0,0341
33 0,4000 -25,8425 0,4216 0,0331
34 0,4000 -24,6345 0,4227 0,0322
35 0,4000 -23,7974 0,4219 0,0313
36 0,4000 -23,3302 0,4195 0,0305
37 0,4000 -23,2036 0,4161 0,0297
38 0,4000 -23,3673 0,4120 0,0290
39 0,4000 -23,7571 0,4077 0,0282
40 0,4000 -24,3028 0,4036 0,0275
41 0,4000 -24,9346 0,3999 0,0269
42 0,4000 -25,5883 0,3969 0,0263
43 0,4000 -26,2094 0,3947 0,0257
44 0,4000 -26,7557 0,3933 0,0251
45 0,4000 -27,1981 0,3926 0,0246
46 0,4000 -27,5209 0,3927 0,0240
47 0,4000 -27,7202 0,3933 0,0235
48 0,4000 -27,8025 0,3943 0,0231
49 0,4000 -27,7822 0,3956 0,0226
********************************************************************
********************************************************************
П И - З А К О Н РЕГУЛИРОВАНИЯ
Выбранные параметры закона :
Настройка К1 = -25.2519
Настройка К2 = -21.7184
********************************************************************
Такт Задание Рег орган Система Ср.кв.ош
0 0,4000 -75,7557 0,0000 0,1600
1 0,4000 -86,3563 0,0000 0,1600
2 0,4000 -96,9568 0,0000 0,1600
3 0,4000 -107,5573 0,0783 0,1600
4 0,4000 -103,3219 0,1622 0,1487
5 0,4000 -95,9572 0,2513 0,1333
6 0,4000 -85,3885 0,3452 0,1174
7 0,4000 -71,5461 0,4282 0,1031
8 0,4000 -57,2707 0,4980 0,0918
9 0,4000 -43,3211 0,5519 0,0836
10 0,4000 -30,5041 0,5879 0,0781
11 0,4000 -19,6723 0,6066 0,0745
12 0,4000 -11,1530 0,6095 0,0720
13 0,4000 -5,1143 0,5991 0,0700
14 0,4000 -1,5455 0,5781 0,0680
15 0,4000 -0,2389 0,5498 0,0657
16 0,4000 -0,8824 0,5172 0,0632
17 0,4000 -3,0893 0,4831 0,0604
18 0,4000 -6,4337 0,4501 0,0576
19 0,4000 -10,4918 0,4199 0,0549
20 0,4000 -14,8683 0,3942 0,0523
21 0,4000 -19,2175 0,3737 0,0499
22 0,4000 -23,2580 0,3588 0,0478
23 0,4000 -26,7798 0,3494 0,0458
24 0,4000 -29,6449 0,3452 0,0441
25 0,4000 -31,7840 0,3454 0,0425
26 0,4000 -33,1886 0,3493 0,0411
27 0,4000 -33,9000 0,3559 0,0397
28 0,4000 -33,9982 0,3642 0,0384
29 0,4000 -33,5891 0,3734 0,0372
30 0,4000 -32,7928 0,3827 0,0360
31 0,4000 -31,7335 0,3915 0,0349
32 0,4000 -30,5296 0,3993 0,0338
33 0,4000 -29,2880 0,4056 0,0328
34 0,4000 -28,0982 0,4105 0,0319
35 0,4000 -27,0301 0,4138 0,0310
36 0,4000 -26,1324 0,4155 0,0302
37 0,4000 -25,4340 0,4159 0,0294
38 0,4000 -24,9448 0,4152 0,0286
39 0,4000 -24,6594 0,4136 0,0279
40 0,4000 -24,5594 0,4114 0,0272
41 0,4000 -24,6178 0,4088 0,0266
42 0,4000 -24,8017 0,4061 0,0260
43 0,4000 -25,0761 0,4035 0,0254
44 0,4000 -25,4061 0,4012 0,0248
45 0,4000 -25,7596 0,3992 0,0243
46 0,4000 -26,1089 0,3976 0,0238
47 0,4000 -26,4316 0,3964 0,0233
48 0,4000 -26,7109 0,3958 0,0228
49 0,4000 -26,9363 0,3955 0,0223
********************************************************************
Таблица 1. Качественные и количественные характеристики системы при изменении задающего воздействия и оптимальных значениях настроек регулятора.
K1опт = -28.7628; K2опт = -25.4146;
|
Задание С1 |
Установив состояние ∆Y∞ |
Статич ошибка ∆Е∞ |
Время переходного процесса tпер.пр., С |
Время регулирования tрег. С |
Перерегулирование σ, % |
Затухание за период ξ, % |
Средний квадрат ошибки за время =25 |
|
С1зад |
0,4 |
0 |
126 |
65 |
50,7 |
91 |
0,0398 |
|
0,5* С1зад |
0,2 |
0 |
126 |
15,8 |
50,7 |
91 |
0,0099 |
|
1,5* С1зад |
0,6 |
0 |
126 |
71,7 |
50,7 |
91 |
0,0895 |
Таблица 2. Качественные и количественные характеристики системы при изменении настроек регулятора и заданном значении задающего воздействия
С 1зад = 0,4 ;
|
Настройки регулятора K 1 и K 2 |
Установив состояние ∆Y∞ |
Статическ ошибка ∆Е∞ |
Время переходного процесса tпер.пр, с |
Время регулирования tрег. С |
Перерегулирование σ ,% |
Затухание за период ξ ,% |
Средний квадрат ошибки за время =25 |
|
K1опт=-28,7628 K2опт= -25,4146 |
0,4 |
0 |
162,5 |
70 |
50,7 |
91 |
0,0398 |
|
K1 = -27,1331 K2 = -25,3891 |
0,4 |
0 |
111,25 |
51 |
22 |
100 |
0,0330 |
|
K1 = -25,2519 K2 = -21,7184 |
0,4 |
0 |
183,75 |
79 |
52,4 |
92,4 |
0,0425 |
|
K1 =-27,4949 K2 = -23,7577 |
0,4 |
0 |
177,5 |
74 |
56,8 |
90 |
0,0431 |
1.Расчёт качественных и количественных характеристик системы при изменении задающего воздействия и оптимальных значениях настроек регулятора.
K1опт = -28,7628; K2опт = -25,4146;
1).Перерегулирование
0,6027-0,4
![]() σ0,4 =
=0,507=50,7%
σ0,4 =
=0,507=50,7%
0,4
0,3014-0,2
![]() σ0,2 =
=0,507=50,7%
σ0,2 =
=0,507=50,7%
0,2
0,9041-0,6
![]() σ0,6 =
=0,507=50,7%
σ0,6 =
=0,507=50,7%
0,6
2).Затухание за период
0,2027-0,0181
![]() ξ0,4 = =0,9107=91%
ξ0,4 = =0,9107=91%
0,2027
0,1014-0,0091
![]() ξ0,2 = =0,9103=91%
ξ0,2 = =0,9103=91%
0,1014
0,3041-0,0272
![]() ξ0,6 = =0,9105=91%
ξ0,6 = =0,9105=91%
0,3041
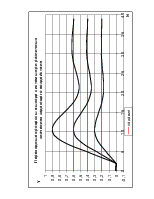
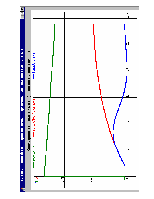
3). Время переходного процесса (из графика)
tпер.пр0,4 = tпер.пр 0,2= tпер.пр 0,6=126c
4).Время регулирования (из графика)
tрег.0,4=65; tрег.0,2=15,8 ; tрег.0,6=71,7
Все рассчитанные оценки представлены в таблице 1.
2.Расчёт качественных и количественных характеристик системы при изменении настроек регулятора и заданном значении задающего воздействия
С 1зад = 0,4 ;
1).Перерегулирование
0,6027-0,4
![]() σ3= = 0,507=50,7%
σ3= = 0,507=50,7%
0,4
0,4883-0,4
![]() σ1= = 0,22=22%
σ1= = 0,22=22%
0,4
0,6095-0,4
![]() σ2= = 0,524=52,4%
σ2= = 0,524=52,4%
0,4
0,6271-0,4
![]() σ4= = 0,568=56,8%
σ4= = 0,568=56,8%
0,4
2).Затухание за период
0,2027-0,0181
![]() ξ3= = 0,91=91%
ξ3= = 0,91=91%
0,2027
0,2285-0,026
![]() ξ1= = 1=100%
ξ1= = 1=100%
0,2285
0,2095-0,0159
![]() ξ2= = 0,924=92,4%
ξ2= = 0,924=92,4%
0,2095
0,2271-0,0227
![]() ξ4= = 0,9=90%
ξ4= = 0,9=90%
0,2271
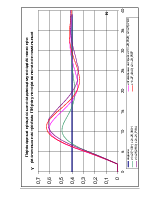
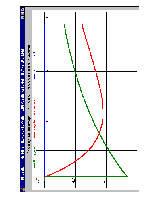
3). Время переходного процесса (из графика)
tпер.пр.3=162,5c; t пер.пр.1=111,25c; t пер.пр.2=183,75c; t пер.пр.4=177,5c
4).Время регулирования (из графика)
tрег.1=51с; tрег.2=79с ; tрег.3=70с; tрег.4=74с
Все рассчитанные оценки представлены в таблице 2.
Вывод:
Сравнительная оценка показателей качества работы системы при заданных условиях эксперимента.
1.Анализ проведенного эксперимента показал:
При изменении задающего воздействия переходные процессы приходит к установившемуся значению (т.е. у(t) = g(t), статическая ошибка E∞ = 0) и характер переходного процесса не изменяется (перерегулирование и затухание за период остаются неизменными, изменяются величины установившихся значений). Характер переходного процесса не зависит от сигнала, а зависит только от корней характеристического уравнения разомкнутой системы.
2. При изменении настроек регулятора меняются время переходного процесса, перерегулирование, затухание за период и средний квадрат ошибки. Сделать вывод о том, какие из приведенных выше настроек наилучшие, можно использовав средний квадрат ошибки или время переходного процесса, как критерий оценки качества. Настройки, приведенные в табл. 2, соответствующие для К1=-27,1331 и К2=-25,3891, являются наилучшими
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.