Исследование цифровой системы импульсно-фазового управления тиристорным мостом
1. Цель работы:
- изучение работы цифровой системы импульсно-фазового управления (СИФУ) однофазного мостового управляемого выпрямителя;
- получение навыков создания виртуальных устройств в пакете Power System Blockset (PSB);
- получение навыков наладки и расчёта цифровых блоков систем управления силовыми выпрямительными устройствами.
2. Постановка задачи
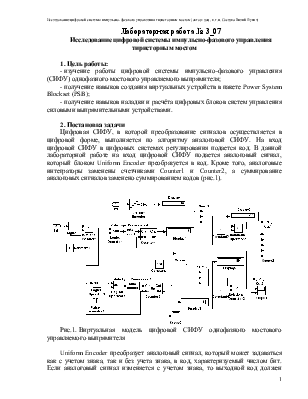
Цифровая СИФУ, в которой преобразование сигналов осуществляется в цифровой форме, выполняется по алгоритму аналоговой СИФУ. На вход цифровой СИФУ в цифровых системах регулирования подается код. В данной лабораторной работе на вход цифровой СИФУ подается аналоговый сигнал, который блоком Uniform Encoder преобразуется в код. Кроме того, аналоговые интеграторы заменены счетчиками Counter1 и Counter2, а суммирование аналоговых сигналов заменено суммированием кодов (рис.1).

Рис.1. Виртуальная модель цифровой СИФУ однофазного мостового управляемого выпрямителя
Uniform Encoder преобразует аналоговый сигнал, который может задаваться как с учетом знака, так и без учета знака, в код, характеризуемый числом бит. Если аналоговый сигнал изменяется с учетом знака, то выходной код должен иметь знаковый разряд, а если аналоговый сигнал изменяется без учета знака, то выходной код не имеет знакового разряда. Форма представления кода задается в меню окна Output type (тип выходных данных). Если выбрать в окне Output type меню Signed integer (целое число со знаком), то код будет иметь знаковый разряд, а при выборе Unsigned integer (целое число без учета знака) в коде знаковый разряд будет отсутствовать и все коды пойдут на представление аналогового сигнала.
Параметр настройки Peak блока Uniform Encoder определяется диапазоном изменения аналогового сигнала, формой его задания (с учетом знака или без) и числом разрядов кода, отведенного для представления аналогового сигнала. Для примера определим величину Peak из условия:
- максимальное изменение аналогового сигнала составляет ![]() (для
примера
(для
примера ![]() );
);
- аналоговому сигналу соответствует выходной сигнал блока Uniform
Encoder ![]() (для
рассматриваемой схемы выпрямителя с дискретностью
(для
рассматриваемой схемы выпрямителя с дискретностью ![]()
![]() =180).
=180).
- на представление аналогового сигнала с учетом знака отведен n бит (n=10);
При таких параметрах входных и выходных сигналов определяется настройка Peak блока Uniform Encoder:
 .
.
Функции цифрового интегратора выполняет блоки Counter, используемые параметры настроек которых приведены ниже:
Count Direction (направление счета) – направление изменения показаний счетчика:
Down – в сторону убывания;
Up - в сторону возрастания;
Count Event (подсчитываемые события) - частота импульсов, влияющих на значение счетчика. Причем, емкость счетчика может изменяться при подъеме (Rising edge), при спаде (Falling edge), или при любом (Either edge) изменении входного сигнала.
Counter Size (размер счетчика) – диапазон, в котором могут изменяться показания счетчика. При выборе User Defined (определено пользователем) становится доступным после Maximum Count (максимальное значение счета), в котором задается максимально возможное значение счетчика. В этом случае показания счетчика изменяются от 0 до установленного значения, а затем счетчик обнуляется и процесс счета (интегрирования) повторяется. Так как импульс, изменяющий емкость счетчика, может фиксироваться по переднему или заднему фронту и может появляться в течение периода в любой момент, то время формирования пилы, основанное на обнулении счетчика при его заполнении, будет задаваться с некоторой погрешностью. Действительно, трудно согласовать два события: окончание периода следования импульсов и изменение емкости счетчика.
Схема формирования пилы будет работать более стабильно при использовании
Reset Input (вход сброса). При установке этого флажка
используется дополнительный порт Rst. При подаче
единичного скачка на этот порт, счетчик устанавливается в исходное состояние.
Это позволяет использовать синхронизирующие импульсы для управления счетчиками.
Учитывая, что угол управления тиристором равен ![]() ,
а дискретность задачи угла составляет
,
а дискретность задачи угла составляет ![]() ,
то заносим в поле Maximum Count число 180 и выбираем Up (счет в сторону возрастания).
,
то заносим в поле Maximum Count число 180 и выбираем Up (счет в сторону возрастания).
Аналогом текущего времени в цифровом интеграторе является частота импульсов, формируемая генератором (Pulse Generator). Так как за пол периода (0,01с) на вход счетчика должно поступить 180 импульсов, то период формируемой последовательности задается соотношением:
![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.