Билет №23
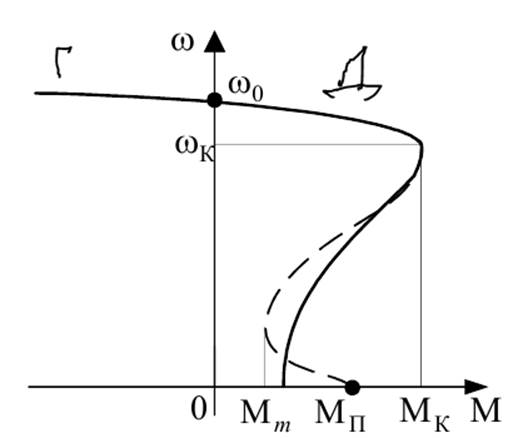
Наибольшее значение для оценки свойств асинхронного
двигателя имеет механическая характеристика, представляющая собой графическую
зависимость частоты вращения ротора от вращающего момента. Иногда эта
зависимость выражается в виде M=f(s). Использование понятия скольжения придает
механической характеристике более общий характер. Для построения механической
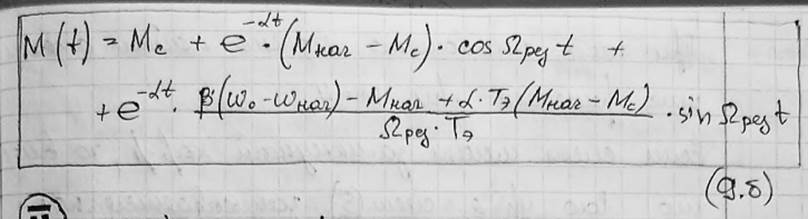
характеристики можно воспользоваться формулой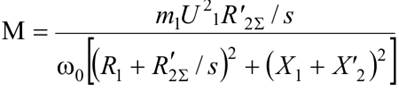 получаемой из
получаемой из
![]() путем подстановки значения тока из схемы замещения
путем подстановки значения тока из схемы замещения

Задаваясь значениями s, при известных параметрах двигателя можно определить Μ и построить искомую механическую характеристику.
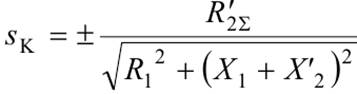
 Скольжение, при котором момент имеет максимальное
значение (критическое скольжение), можно определить из выражения для момента,
взяв производную от момента по скольжению dM/ds и приравняв ее нулю. Решая
уравнение относительно s, получаем критическое скольжение
Скольжение, при котором момент имеет максимальное
значение (критическое скольжение), можно определить из выражения для момента,
взяв производную от момента по скольжению dM/ds и приравняв ее нулю. Решая
уравнение относительно s, получаем критическое скольжение
Для получения высокого КПД необходимо снижать R2,
вследствие чего максимум момента асинхронного двигателя достигается при
относительно высоких частотах вращения. Значение максимального момента получим
из выражения для момента, подставив значение sкр: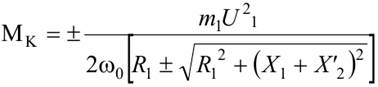
Знак « + » относится к двигательному режиму, « - » — к генераторному. Из уравнений видно, что максимальный момент не зависит от активного сопротивления ротора. Это сопротивление определяет лишь скольжение при максимальном моменте.
При увеличении скольжения от s = 0 до 1, ток ротора монотонно возрастает, в то время как электромагнитный момент Μ сначала увеличивается с ростом скольжения, достигает максимума при s = sкр, а затем уменьшается, несмотря на возрастание тока .Физически это объясняется тем, что в формуле момента при малых скольжениях преобладающее влияние имеет возрастание тока I2. При увеличении скольжения свыше sкр ток I2 возрастает сравнительно мало и преобладающее влияние оказывает уменьшение cosψ2, которое происходит вследствие повышения частоты в роторе: f2=sf1.
Разделив выражение для момента на выражение для критического момента с учетом выражения для скольжения, после преобразования получим
 Если допустимо принять q = 0, то
Если допустимо принять q = 0, то  формула Клосса.
формула Клосса.
Основные точки характеристики:
1. Идеальный холостой ход при синхронной скорости ротора:

2. Номинальный режим:
![]()
3. Критическая точка:
![]()
4. Режим короткого замыкания (пуск):
![]()
Структуры цифро-аналоговых систем также как и аналоговых могут выполнятся по принципу подчиненного регулирования. Функциональная схема показана на рис.
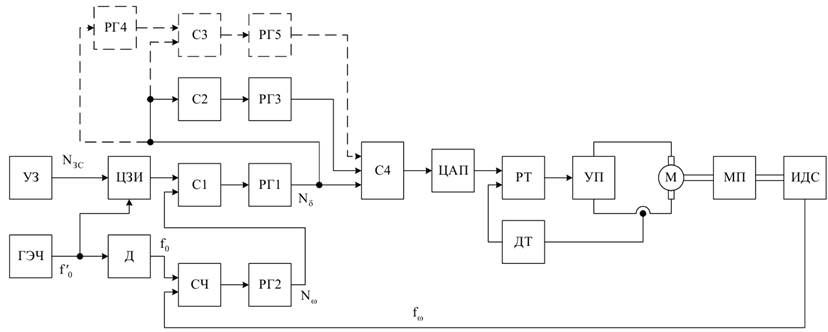
Основной контур регулирования скорости выполняется цифровым:
цифровой задатчик интенсивности ЦЗИ, цифровая система обработки
информации о скорости, цифровой регулятор скорости РС. Сигнал задания тока
формируется на выходе цифро-аналогового преобразователя ЦАП. УЗ – устройство
задания скорости. При пропорциональном РС сигнал ошибки Nδ
подается непосредственно на ЦАП. При более сложной структуре регулятора
вводятся дополнительные регистры для приема и промежуточного хранения
информации в процессе выполнения вычислительных операций. А также
сумматоры для выполнения арифметического суммирования. При ПИ- РС для
получения интегральной составляющей производится суммирование текущих значений
ошибки Nδ в накапливающем сумматоре С2 с последующим
сохранением результата в регистре РГ3. Все составляющие выходного
сигнала регулятора суммируются в сумматоре С4 и виде числа NΣ
поступают на ЦАП. При ПИД-регуляторе для получения дифференциальной
составляющей в сумматоре С3 из текущего значения ошибки Nδ
вычитается предыдущее значение ошибки, хранимое в РГ4. В цифровой форме
ПИД закон регулирования может быть представлен в следующем виде: ![]()
![]()
где K1, K2 , K3 – масштабные коэффициенты.
Когда управление рабочей машиной производится от ЭВМ, то для локальной цифро-аналоговой системы управления можно применить более простую. Функциональная схема которой представлена на рис.
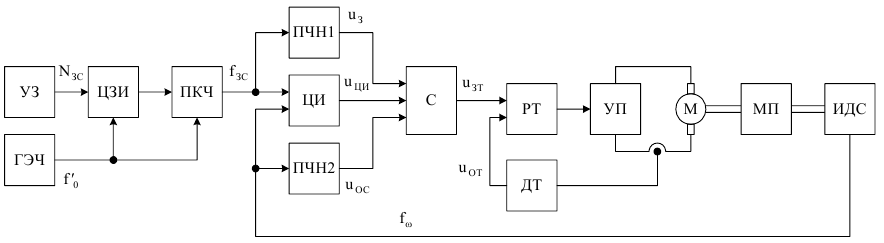
В преобразователе “код-частота” ПКЧ производится преобразование сигнала задания скорости в импульсную форму. Частота импульсов fЗС определяет требуемую скорость вращения
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




