Рис.3.3.3 Условное обозначение и нумерация выводов АЛС 324А
Для преобразования двоичного кода в семисегментный используем микросхему 514 ИД1.
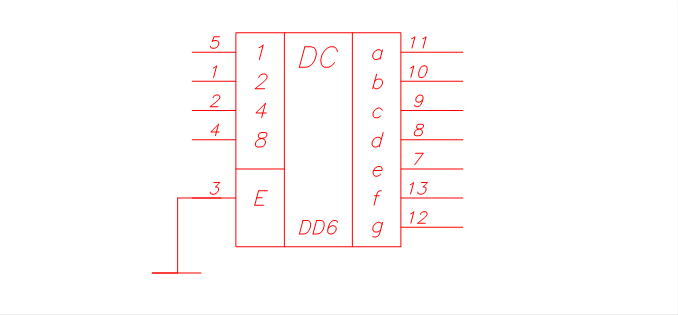 |
Вход Е – вход гашения, при Е=1 на выходе низкие уровни, и соответственно происходит гашение индикатора.
Оперируя регистром КР580ИР82, дешифратором 514ИД1 и индикатором АЛС321А, можно организовать довольно не плохую систему отображения информации, что мы и сделали.
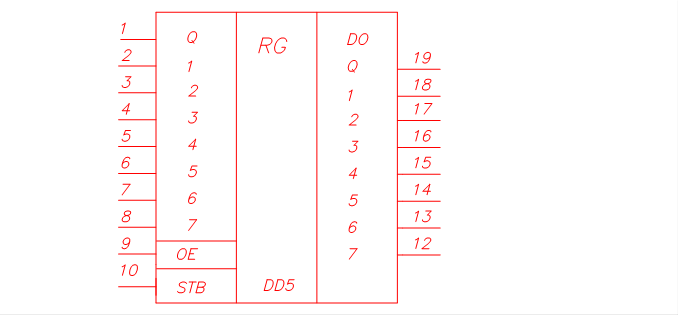 |
Рис.3.3.5 Условное обозначение микросхемы КР580ИР82
Т.к. 514ИД1 дешифратор имеет четыре входа данных, то на один КР580ИР82 регистр будем присоединять два дешифратора и соответственно ещё два индикатора. Таким образом организация индикации представлена на рис.3.3.6.

На входы STB подаётся напряжение высокого уровня лишь в том
случае, когда нам необходимо получить на выходах регистра информацию, иначе
регистры защёлкиваются сохраняя при этом накопленную информацию.
Рис 3.3.6 Подключение индикации
3.3.4. Интерфейс
Так как наша система построенная на базе МК51 должна иметь выход на последовательный интерфейс ИРПС, то перед нами встают следующие проблемы:
- согласование уровней сигналов ИРПС и МК51 (ТТЛ);
- поддержание стандартной скорости приема - передачи;
- поддержание стандартных форматов посылки;
- поддержание стандартных протоколов обмена.
 |
|
|
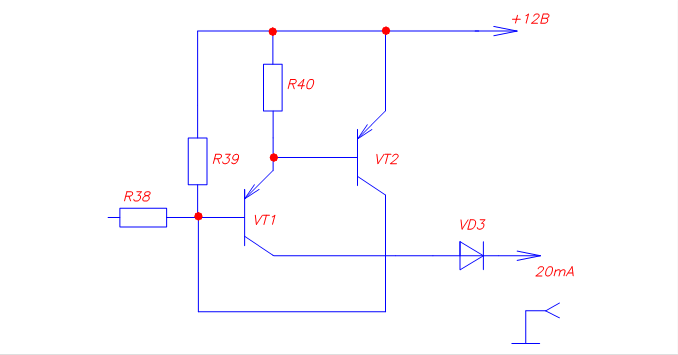
Рис.3.3.7 Схема преобразователя уровня (передатчик)
R38=3кОм. R39=330Ом. R40=33Ом.
VT1,VT2:KT561.
|
|
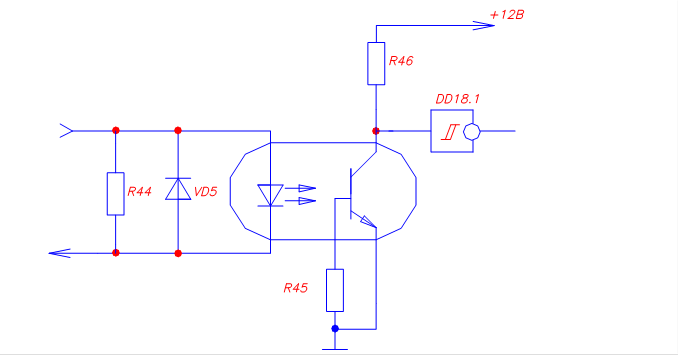 |
Рис.3.3.8 Схема преобразователя уровня (приемник)
R44=330Ом. R45=47кОм. R46=1кОм.
DD18: К555ТЛ2.
Е1: АОТ127.
Поддержание стандартного ряда скоростей (19200, 9600, 4800, 2400, 1200, 600, 300 бит/с) является более сложной задачей, так как скорость приемо-передачи УАПП зависит от тактовой частоты МК51.
Последовательный порт может работать в четырех режимах:
Режим 0 – не используется.
Режим 1 – режим приемо-передачи 8-ми битных данных, скорость передачи определяется т/с1.
Режим 2 – передача 9 битов данных, скорость передачи неизменна.
Режим 3 – передача 9 битов данных, скорость передачи определяется т/с1.
Выбираем режим 1.
Fпередачи=(2SMOD×Fov т/c1)/32
Fov т/c1 – частота переполнения т/c1, зависит от режима таймера.
Будем использовать таймер т/c1 в режиме автоперезагрузки.
Fov т/c1=FZQ/(12×(256-TH1))
FZQ=12Мгц
Fпередачи=9600бит/c SMOD=1 => TH1=250
![]() Любой из
известных протоколов последовательного обмена с сигналами квитирования легко
реализуется программным путем. В МК51 не реализованы сигналы квитирования,
поэтому для их формирования надо выделить разряды порта.
Любой из
известных протоколов последовательного обмена с сигналами квитирования легко
реализуется программным путем. В МК51 не реализованы сигналы квитирования,
поэтому для их формирования надо выделить разряды порта.
![]()
![]() DTR – сигнал для
внешнего компьютера, означающий что имеются данные для передачи.
DTR – сигнал для
внешнего компьютера, означающий что имеются данные для передачи.
DSR – сигнал, который компьютер посылает в ответ на DTR.
DSR=0 означает что внешний компьютер готов принять данные.
Для подключения любой линии интерфейса ИРПС необходимо использовать рассмотренные выше преобразователи уровней.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.