



Билет №7
1. Принципиальная схема двухканальной двухконтурной САУ скоростью электроприводов постоянного тока.
ЭП с двухзонным регулированием скорости: в I зоне — от 0 до основной (номинальной) изменением напряжения на якоре. Во второй зоне от основной до максимальной изменением магнитного тока.
Рассмотрим диаграмму регулирования — зависимость допустимых тока, момента и мощности от скорости:
 |
1. I зона. По условиям нагрева при Ф = Фн = const длительно допустимые значения Iдоп = Iн, Мдоп = Мн. при этом при изменении скорости от нуля до ωн мощность изменяется так же (0…Рн).
2. II зона. При уменьшении потока считается, что постоянные потери изменяются незначительно и можно считать, что Iдоп = Iном = const. Длительно допустимый момент Мдоп=кФ*Iн
ω = (ωн … ωн ) = Ия. н. / кФ
Рдоп = Мдоп * ω = кФ * Iн * (Ия. н. / кФ) = Iн = const
Максимально допустимый ток, т. е. перегрузочная способность, определяется условием коммутации на коллекторе с уменьшением потока основных полюсов уменьшается, т. е. при регулировании во второй зоне необходимо обеспечить снижение уровня ограничения регулятора скорости, т. е. задание max тока.
В замкнутой САУ скоростью при переходе во вторую зону поддерживается заданное значение ЭДС регулятором, воздействующим на цепь возбуждения.
Е = кФ * ω; Е = const; ω↑ кФ↓;
В двухфазной САУ при набросе нагрузки возрастает падение напряжения на якоре, что компенсируется увеличением ЭДС преобр. якорного канала. Поток при этом остается неизменным.
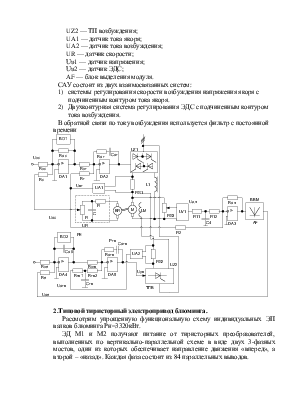
Изобразим упрощенную схему где UZ1 — тиристорный преобразователь якоря;
UZ2 — ТП возбуждения;
UA1 — датчик тока якоря;
UA2 — датчик тока возбуждения;
UR — датчик скорости;
Uυ1 — датчик напряжения;
Uυ2 — датчик ЭДС;
AF — блок выделения модуля.
САУ состоит из двух взаимосвязанных систем:
1) системы регулирования скорости возбуждения напряжения якоря с подчиненным контуром тока якоря.
2) Двухконтурная система регулирования ЭДС с подчиненным контуром тока возбуждения.
В обратной связи по току возбуждения используется фильтр с постоянной времени
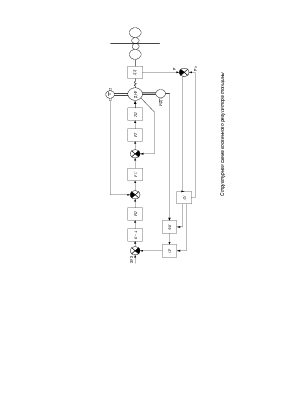
2.Типовой тиристорный электропривод блюминга.
Рассмотрим упрощенную функциональную схему индивидуальных ЭП валков блюминга Рн=3320кВт.
ЭД М1 и М2 получают питание от тиристорных преобразователей, выполненных по вертикально-параллельной схеме в виде двух 3-фазных мостов, один из которых обеспечивает направление движения «вперед», а второй – «назад». Каждая фаза состоит из 84 параллельных выводов.
СУ ЭП обеспечивает двухзонное регулирование скорости вращения и имеет две независимых системы регулирования напряжения на якорях М1 и М2 и тока возбуждения на обмотках LОВД1 и LОВД2.
При этом происходит разделение режимов работы как при разгоне, так и при торможении двигателя. Особенностью СУ является применение модели ЭД (МЭД1 и МЭД2).
Если выходным сигналом двигателя считать Э.Д.С., то модель двигателя представляет разомкнутую систему с единичной о.с. и последовательным соединением апериодического звена с электромагнитной постоянной времени якоря Тэ и интегрирующего звена с электромеханической постоянно времени Тм. В этом случае коэффициент усиления звеньев равны единице, выходной величиной апериодического звена (МЭД) – Э.Д.С. двигателя. В модели электромагнитная постоянная времени якоря Тэ и электромеханическая постоянная времени Тм равны действительным значениям этих величин в ЭП блюминга. Так как в модели нагрузка двигателя отсутствует, то выходное напряжение звена МЭД будет пропорционально динамическому состоянию тока двигателя. При подаче на вход модели с сумматора СН фактического напряжения на якоря двигателей М1 и М2 выходной сигнал звена МЭД будет пропорционален фактическому значению динамического состояния тока, а выходной сигнал звена ММД – фактическому значению Э.Д.С. двигателя. Эти сигналы подаются как сигналы о.с. соответственно на вход регулятора динамического тока РДТ (ПИ-регулятор) и на вход регулятора напряжения РН (П-регулятор). Управление ЭП осуществляется педальным СКК, который через фазочувствительный выпрямитель ВФ и бесконтактный ключ БК (при работе замкнут) подает задающее напряжение на вход РН, выход которого является заданием для РДТ, управляющего через фазоимпульсную систему управления ФУ величиной напряжения (скорость вращения двигателя) ТП1 и ТП2. Сумматор СН кроме сигнала, пропорционального сумме напряжений на якорях М1 и М2, подаваемого на вход модели двигателя, который подается на вход ФУ ТП1 непосредственно и ТП2 через инвертор И, изменяющий полярность сигнала.
В данной схеме о.с. по динамическому току обеспечивает необходимое ускорение привода при ступенчатом изменении задания на напряжение СКК.
Если ток двигателя превышает допустимый, соответствующий максимальной эксплуатационной рабочей характеристике и контролируемое сумматором СТ, срабатывает релейное устройство РУ, бесконтактный ключ БК размыкается и двигатель останавливается. Этому режиму работы предшествует работа узла (на схеме не показано), обеспечивающего при перегрузке двигателей снижение уставки динамического тока за счет ограничения выхода РН. СУ током возбуждения двигателя является двухконтурной и построена
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.