Билет25
1Принцип построения и схемные реализации систем УП-Д.
Для получения высоких тех. показателей регулир. и
автоматиз. ЭД запитываются от управляемого преобразоват. Чаще всего УП может
быть представлен апер. звеном с пост. времени Тп и Кп.![]() .
. ![]() -
упр-щее напр. на вх. УП и т.о. в электро-мех. сист. вводится дополнит. динамич.
звено
-
упр-щее напр. на вх. УП и т.о. в электро-мех. сист. вводится дополнит. динамич.
звено ![]() . Поскольку мощ. УП соизмерима с
мощ. Эд то на хар. ЭП оказыв. влияние пар-ры УП.
. Поскольку мощ. УП соизмерима с
мощ. Эд то на хар. ЭП оказыв. влияние пар-ры УП.
![]()
 Система генератор-двигатель.
Система генератор-двигатель.
 Питание ЭД осущ. от эл-шинного преоб. агрегата., сост.
из приводного ЭД (ПД) и Г-генератора пост. тока. Регул. координат ЭП в первой
зоне осущ. за счет ЭДС генер. (Ег), при воздействии на его ОВГ. Рег. во втор.
зоне за счет изменен. магнитного потока самого ЭД. Если в кач-ве ПД использ. СД
то из-за своей колебат-ти он оказ-ет влияние на динамику системы. У АД хар-ка
имеет определ. жесткость и при изменен. нагр-ки скор. генер. измен. Это
приводит к допол. изменен. мощности мех. хар-ки ЭП. Для управл. Ф генератора
исп. тиристорный возбудитель ТВ. Регул. хар-ка ТВ при cos-ном
опорн. напряжен. СИФУ линейно, а при линейном опорном sin-но.
Без большой погрешности эта хар-ка линеаризуется и ТВ можно описать след.
у-ниями:
Питание ЭД осущ. от эл-шинного преоб. агрегата., сост.
из приводного ЭД (ПД) и Г-генератора пост. тока. Регул. координат ЭП в первой
зоне осущ. за счет ЭДС генер. (Ег), при воздействии на его ОВГ. Рег. во втор.
зоне за счет изменен. магнитного потока самого ЭД. Если в кач-ве ПД использ. СД
то из-за своей колебат-ти он оказ-ет влияние на динамику системы. У АД хар-ка
имеет определ. жесткость и при изменен. нагр-ки скор. генер. измен. Это
приводит к допол. изменен. мощности мех. хар-ки ЭП. Для управл. Ф генератора
исп. тиристорный возбудитель ТВ. Регул. хар-ка ТВ при cos-ном
опорн. напряжен. СИФУ линейно, а при линейном опорном sin-но.
Без большой погрешности эта хар-ка линеаризуется и ТВ можно описать след.
у-ниями:
![]() ,
,![]()
![]()
Ттв-определ. суммой времени запаздывания и Тф на входе СИФУ.
Генератор.  При изменен скор. Г регулир. хар-ка неоднозначна,
кроме того в динамике возможна работа на частых петлях гестерезиса. Обычно исп.
линейный участок кривой.
При изменен скор. Г регулир. хар-ка неоднозначна,
кроме того в динамике возможна работа на частых петлях гестерезиса. Обычно исп.
линейный участок кривой.
![]()
![]()
![]()
![]()
Параметры цепи возбужд. включают внутренние пар-ры возбудителя.
![]() ;
; ![]() ;
;
![]() . Для ускорения пер. проц. эти
генераторы допускают 5-ти или 10-ти кратную форсировку по цепи возб.
. Для ускорения пер. проц. эти
генераторы допускают 5-ти или 10-ти кратную форсировку по цепи возб. ![]() Ур-нение якор. цепи:
Ур-нение якор. цепи:
![]()
![]()
![]()
Пар-ры якор. цепи:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() 7.2
7.2
![]()
Особен. системы.
1. Большая установленная мощность эл. машин Р>3.5Рд.
2. Низкий КПД=КПДпд*КПДг* КПДд
3. Невыс. точн. регул-ния в первую очередь из-за регули-й хар-ки генератора.
4. Отсутствие гармоник и искож. сети.
Система ТП-ЭД.
 РИС 8.
РИС 8.
Парам. якор. цепи: ![]() и
и ![]() . Преобразователь представляется
ист. ЭДС. Регул. хар. линеариз. и для возбудителя:
. Преобразователь представляется
ист. ЭДС. Регул. хар. линеариз. и для возбудителя: ![]()
![]()
![]() . В реж. прер. тока внеш. хар.
нелин. и при нереверс. преобразователе из-за односторон. проводимости вентелей
может возникнуть неуправляемость. В рев. преоб. с совмест. управлен. зона
прерыв. токов может быть исключена но нелин. внеш. хар. может сохр. из-за
падения напряжен. от уравнит. тока и неточного согласов. угла отпирания.
Описание якор. цепи:
. В реж. прер. тока внеш. хар.
нелин. и при нереверс. преобразователе из-за односторон. проводимости вентелей
может возникнуть неуправляемость. В рев. преоб. с совмест. управлен. зона
прерыв. токов может быть исключена но нелин. внеш. хар. может сохр. из-за
падения напряжен. от уравнит. тока и неточного согласов. угла отпирания.
Описание якор. цепи: ![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() .
Ур-ние движен. представим:
.
Ур-ние движен. представим:
![]() ;
; ![]() ;
;
![]() ;
; ![]() .
.
 Коэф.
мощности УП для первой гармоники тока:
Коэф.
мощности УП для первой гармоники тока: ![]() в
рез. получ. что при широком диапазоне регул. система выступ. как источник
реакт. энергии.
в
рез. получ. что при широком диапазоне регул. система выступ. как источник
реакт. энергии.
Система ПЧ-АД.
Преобразователи частоты выполняются как на электромашинных агрегатах, так и статическими. В первом случае используют синх. или асинх. генератор.
УПП-управл. преобр. пост. тока. ПД-приводной ЭД.
 УПП спом. ПД обеспеч. регулирование скорости СГ и
выходной частоты f1. Управление выходным напряжением U1
осуществляется по цепи возбужд. цепи генер.
УПП спом. ПД обеспеч. регулирование скорости СГ и
выходной частоты f1. Управление выходным напряжением U1
осуществляется по цепи возбужд. цепи генер.
Т.к. ЭДС в роторной цепи является функцией скольжения и напряжения не статоре, то для получения заданного закона частотного регулирования может потребоватся регулятор переменного напряжения РН . В этих системах присутствует большое кол-во ступеней преобразования энергии – т.е. низкий КПД, большая инерционность , но гладкая форма выходного напряж.
Статич. преобразователи в зависимости от требований выполняются в виде
источника напряжений или тока. При частотном регулировании обеспечивается
необходимая жесткость статич. хар. и критический момент. При частотно-токовом
регулир. обеспеч. регулир.  момента в динамичю процццесах.
момента в динамичю процццесах.
Uуф-управляющее напряжение тока и его фазы.
ИРЭ-регулируемый ист. реакт. энергии.
Если нагрузка Мс меняется , меняется ток ротора , то должна менятся не только величина но и фаза тока статора для сохр. потокосцепления ротора. Для получения управляющих напряжений Uуf Uyi Uyф используют нелинейные звенья так называемые функциональные преобразователи.
Система ШИП-ЭД.
 Питание ЭД осущ за счет измен. скважности работы
управл. ключей.
Питание ЭД осущ за счет измен. скважности работы
управл. ключей.
Питание ШИП может роизводится от неупр. выпрямителя если не треб регулир тормож. В противном случае необходимо ставить узел сброса энергии или управ. инвертор. Частота ком. ключей 2,5-5 кГц. при этом преобразоват. можно считать безинерц. звеном.
В большинстве преобраз. использ. несим. ком-цию. К примеру, для одного вращения замкнут пост. УК4, а УК1 и УК2 комутир-ся в противофазе. При другом направ. вращен. замкнут постоянно УК3 . Подобный з-н позволяет получ меньшие пульсации тока.
ЭП с вентильным ЭД (безколекторный).
В кач. ЭД исп. СД с пост. магнитами с датчиком положен. ротора и ТГ. Т.о. датчик положен. вместе с ключами АИНа выпол. функцию аналогич. коллектора ДПТ.
2. Принципы построения СЧПУ шаговым двигателем.
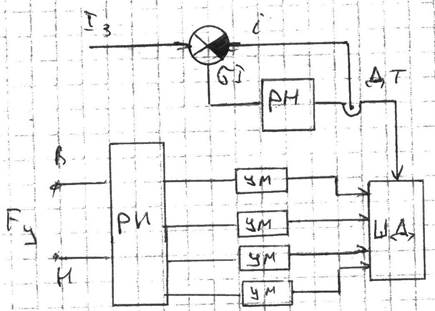
Наиболее простыми являются шаговые приводы с разомкнутой структурой с питанием от источника тока или напряжения. Рассмотрим структуру такого привода.
 Управляющий сигнал FУ, определяющий частоту управления, поступает
на вход В или Н (вперёд или назад) в распределитель импульсов (РИ), который
включает в соответствующий канал усилителя мощности (УМ). При питании шагового
двигателя (ШД) от источника напряжения требуемый уровень тока IЗ в фазах шагового двигателя поддерживается с
помощью регулятора напряжения РН, на вход которого подаётся отклонение тока от
заданного значения Δi.
Управляющий сигнал FУ, определяющий частоту управления, поступает
на вход В или Н (вперёд или назад) в распределитель импульсов (РИ), который
включает в соответствующий канал усилителя мощности (УМ). При питании шагового
двигателя (ШД) от источника напряжения требуемый уровень тока IЗ в фазах шагового двигателя поддерживается с
помощью регулятора напряжения РН, на вход которого подаётся отклонение тока от
заданного значения Δi.
РН представляет собой широтно-импульсный или частотно-импульсный преобразователь.
Приводы, предназначенные для реализации заданного закона изменения скорости выполняются с замкнутой системой управления.
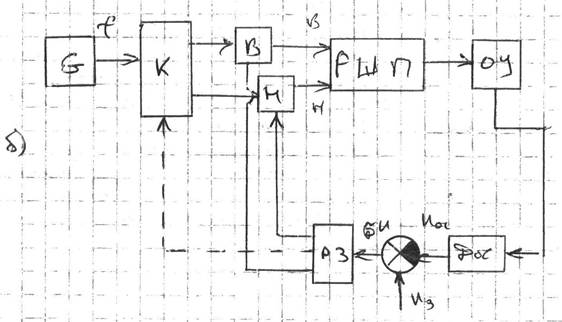
Шаговый привод с пропорциональным (а) и релейным (б) регулированием
На рис.а) показана замкнутая система шагового привода с пропорциональным регулированием выходной координаты (скорости или положения).
Система состоит из РШП (разомкнутого шагового привода), объекта управления ОУ, содержащего аналоговый датчик регулируемого параметра, преобразователя ПНЧ, преобразующего аналоговый сигнал обратной связи UОС в последовательность импульсов с частотой f, частотного коммутатора ЧК и задающего генератора импульсов. ЧК сравнивает заданную частоту fЗ с частотой ОС f. Полученный при этом сигнал с частотой Δf = fЗ – f, в зависимости от его знаков поступает на вход вперёд В ли назад Н распределителя импульсов РИ.
На рис.б) показана замкнутая система шагового привода с релейным управлением. Здесь в результате сравнения аналоговых сигналов задания UЗ и ОС UОС образуется сигнал рассогласования ΔU, поступающий на вход релейного элемента РЭ, который может быть двух или трёх позиционной.
При двух позиционной РЭ вырабатываемые генератором G импульсы с постоянной частотой f , в зависимости от знака рассогласования, поступает на входы В или Н РШП. При этом ключ К открывается или запирается не зависимо от наличия рассогласования. При трёх позиционном релейном элементе дополнительно используется состояние равенства UЗ = UОС. При этом ΔU = 0 и ключ К запирается.
Рассмотрим разомкнутую систему ЧПУ с шаговым двигателем привода
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




