








Министерство образования Республики Беларусь
Гомельский государственный технический университет
им. П.О. Сухого
Факультет автоматизированных и информационных систем
Кафедра АЭП
Расчетно-графическая работа
по СУЭП
«Расчет системы управления электроприводом
для передвижения крана»
Исполнители:
студенты гр. ЭП-41
Руководитель:
Гомель 2006
Выбор и расчет параметров трансформатора.
Расчет параметров якорной цепи двигателя.
Выбираем трансформатор ТСП–25/0,7–УХЛ4. Параметры трансформатора сводим в таблицу.
|
Тип |
U2 |
I2 |
Преобразователь |
Sном |
PХХ |
РКЗ |
UКЗ, % |
|
|
U |
I |
|||||||
|
В |
А |
В |
А |
кВ∙А |
Вт |
Вт |
% |
|
|
ТСП–25/0,7–УХЛ4 |
205 |
82 |
230 |
100 |
29,1 |
210 |
1100 |
5,5 |
Рассчитываем параметры трансформатора:
Определяем параметры якорной цепи двигателя:
Rя = Rяд + 2∙Rт + Rк = 0,28 + 2∙0,055 + 0,055 = 0,43 Ом

Lя = Lяд + 2∙Lт = Lя = 7,106 + 2 ∙ 0,18 = 7,466 мГн.
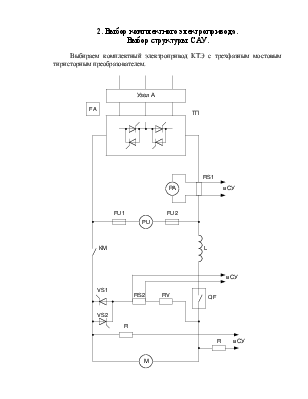
2. Выбор комплектного электропривода.
Выбор структуры САУ.
Выбираем комплектный электропривод КТЭ с трехфазным мостовым тиристорным преобразователем.
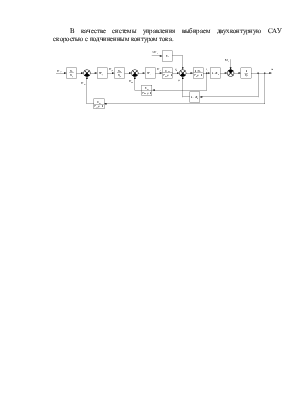
В качестве системы управления выбираем двухконтурную САУ скоростью с подчиненным контуром тока.
3. Расчет внешних и регулировочных характеристик тиристорного преобразователя в режиме непрерывного и прерывистого токов.
Расчет внешних и регулировочных характеристик производим в математическом пакете MathCAD. Расчет регулировочных характеристик в зоне прерывистых токов производим исходя из внешних характеристик преобразователя в зоне прерывистых токов. Расчет производим по следующим формулам:
Ed = Ея + Iя∙(Rя – Rк) = Ея + Iя∙(0,43 – 0,055) = Ея + 0,375∙Iя
Результаты расчетов в зоне прерывистых токов заносим в таблицу:
|
Ея |
Iя |
α |
Еd |
Uу |
ΔЕd |
ΔUу |
Ктп |
|
В |
А |
град |
В |
В |
В |
В |
– |
|
130 |
0 |
90 |
130 |
0 |
– |
– |
– |
|
0,7 |
80 |
130,3 |
1,111 |
0,3 |
1,111 |
0,27 |
|
|
3,9 |
70 |
131,5 |
2,222 |
1,5 |
1,111 |
1,35 |
|
|
175 |
0 |
80 |
175 |
1,111 |
– |
– |
– |
|
0,6 |
70 |
175,2 |
2,222 |
0,2 |
1,111 |
0,18 |
|
|
3,3 |
60 |
176,2 |
3,333 |
1,2 |
1,111 |
1,08 |
|
|
215 |
0 |
70 |
215 |
2,222 |
– |
– |
– |
|
0,5 |
60 |
215,2 |
3,333 |
0,2 |
1,111 |
0,18 |
|
|
2,5 |
50 |
215,9 |
4,444 |
0,9 |
1,111 |
0,81 |
По полученным данным строим регулировочные характеристики в зоне прерывистых токов.
4. Расчет параметров структурной схемы САУ.
К∙Фн = 1,467
J = 0,425 кг∙м2
5. Синтез контуров регулирования методом стандартных настроек контуров. Расчет ограничения регуляторов.
5.1. Контур тока.
ТµI = Ттп = 3,33 мс
Тм = 85 мс
Так как Тм > ТµI, то можно пренебречь обратной связью по ЭДС якоря. Тогда при настройке на ТО необходим ПИ-регулятор.
Трт = Тя = 17,36 мс

5.2. Контур скорости.
Тµω = 2∙ТµI = 2∙3,33∙10-3 = 6,66 мс

6. Синтез контуров регулирования методом
желаемых частотных характеристик.
6.1. Контур тока.

20lgК = 20lg0,293 = –11
![]()
К = 100; Т = 0,061 с.
6.2. Контур скорости.
Заменим контур тока эквивалентной передаточной функцией:
Кот = 0,074; 

20lgК = 20lg1,77 = 5
![]()
![]()
7. Оптимизация контуров регулирования по Баттерворту.
7.1. Контур тока.
Получаем характеристическое уравнение:
![]()


Используя математический пакет MathCAD получаем:
Трт = 8,328∙10-3; Крт = 0,057
τпп = 5,9

7.2. Контур скорости.
Wрс(р) = Крс


Получаем характеристическое уравнение:
![]()
![]()
![]()
![]()
Используя математический пакет MathCAD получаем:
Крс = 34,156
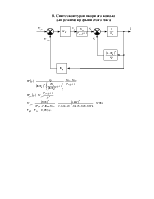
8. Синтез контуров якорного канала
для режима прерывистого тока.

Трт = Тм = 0,085 с.
9. Расчет переходных процессов «в малом» и «в большом» для каждого варианта оптимизации контуров.
Расчет и построение переходных процессов производим в программе SMED. Для каждого варианта оптимизации контуров задаем скачки напряжения задания ΔUзс, напряжения сети ΔUс и момента нагрузки ΔМс.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.